


























ТЕХНИЧЕСКАЯ ПОДДЕРЖКА


Опубликовано 2026-03-23
Вы когда-нибудь сталкивались с такой ситуацией: вы купили микросервопривод сервоприводи хотел написать программу для управления им. Однако после долгого поиска в сети либо код не сработал, либо библиотеку установить не удалось? Не волнуйтесь, сегодня мы поговорим о том, как использовать 3, чтобы заполучить этого малыша и сделать его послушным в ваших творческих проектах.
Его краткий синтаксис и богатая библиотечная экосистема делают его отличным выбором для быстрой разработки прототипов. Управляя микросервоприводами, вам не нужно заботиться о деталях базовых регистров, таких как язык C. Вы можете заставить сервопривод вращаться всего несколькими строками кода. Это просто спасительная соломинка для быстрой проверки на этапе инновационного продукта. Более того, его можно легко комбинировать с расширенными функциями, такими как визуальное распознавание и анализ данных, благодаря чему рулевой механизм перестает быть простым приводом, а становится частью интеллектуальной системы.
Основными решениями на рынке являются RPi.GPIO и .
Если вы используете Raspberry Pi, RPi.GPIO — самый простой выбор. Он может напрямую управлять выводами GPIO для генерации сигналов ШИМ. Однако следует отметить, что этот пакет имеет определенные ограничения в обеспечении точности ШИМ, что может легко вызвать вибрацию сервопривода.
По сравнению с ним пакет Servo выглядит более профессиональным. Он использует аппаратную или программную ШИМ для точного управления шириной импульса, чтобы сервопривод вращался плавно и плавно. Рекомендуется использовать этот пакет, поскольку его инкапсуляция более полная, он поддерживает одновременное управление несколькими сервоприводами, а код более элегантен в написании.
Первый шаг — убедиться, что ваш 3 успешно установлен. Затем введите точно:pip3 --сервов терминале. Выполнение этой команды полностью установит все необходимые библиотеки и зависимости.
1. Если вы используете Raspberry Pi, вам также необходимо включить функцию I2C или аппаратную ШИМ. Вы можете открыть соответствующий интерфейс в raspi-. 2. При выполнении аппаратных подключений обратите особое внимание на три провода сервопривода: коричневый провод должен быть подключен к GND, красный провод должен быть подключен к источнику питания 5 В, а оранжевый провод должен быть подключен к контакту управления GPIO. Обязательно не подключайте его наоборот, иначе сервопривод может сгореть. В качестве источника питания рекомендуется использовать внешний источник питания 5 В. Не берите питание напрямую с контактов Raspberry Pi, потому что тока будет недостаточно.
Следующий код имеет функцию поворота сервопривода вперед и назад в диапазоне от 0 до 180 градусов. Во-первых, используйтедоскаиPWMIOинициализировать канал ШИМ для создания базовой среды для работы сервопривода. Далее создайтесервоприводобъект для облегчения точного управления сервоприводом. Среди них ключевым моментом является оператор присваивания, такой каксерво.угол = 0Благодаря этому утверждению угол, на который сервопривод хочет вращаться, может быть гибко установлен. То есть на сколько градусов вы хотите, чтобы сервопривод вращался, вы можете задать ему соответствующий градус. Если вы хотите, чтобы сервопривод двигался медленнее, чтобы вы могли более четко наблюдать за его вращением, вы можете добавитьвремя.сонзаявление для достижения этой цели.
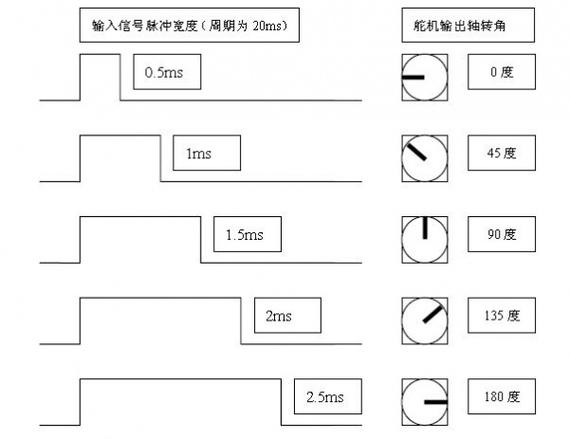
Если сервопривод издает ненормальный шум, обычно проблема связана с частотой импульсов. Стандартный период ШИМ микросервопривода составляет 20 мс. Когда время высокого уровня находится в диапазоне от 0,5 мс до 2,5 мс, соответствующий угол составляет от 0 до 180 градусов. Библиотека по умолчанию использует эту настройку параметра, поэтому пользователю не нужно самостоятельно рассчитывать соответствующие значения.
Когда проект требует совместной работы нескольких сервоприводов, например, при создании роботизированной руки или многосуставного робота, использование библиотеки особенно удобно. Вам просто нужно создать несколькосервоприводобъекты, каждый из которых привязан к отдельному выводу GPIO, а затем индивидуально устанавливайте их углы. Есть небольшая хитрость: при использованииpwmio., помещатьУстановите значение 50, что является стандартной частотой сервопривода. Если это такая плата расширения ШИМ, код практически тот же. Вам нужно всего лишь изменить адрес I2C, чтобы одновременно управлять 16 сервоприводами, что очень подходит для сложных проектов.
Многие друзья сообщили, что сервопривод внезапно перестал двигаться или угол был неправильным. Самая распространенная причина – проблема с электропитанием. Мгновенный ток микросервопривода может достигать более 1А. Если одновременно активируются несколько сервоприводов, мгновенное падение напряжения приведет к перезапуску Raspberry Pi. Решение состоит в том, чтобы использовать отдельный регулируемый источник питания для питания сервопривода, а заземляющий провод должен быть подключен к земле Raspberry Pi. Еще одна ловушка – это диапазон углов. Механический предел некоторых моделей составляет всего 0-120 градусов. Если вы заставите его повернуть на 180 градусов, коробка передач застрянет и издаст звук щелчка. В это время немедленно отключите питание и проверьте конкретные параметры модели сервопривода.
Управляя микросервоприводом, вы фактически быстро превращаете свое творчество в подвижную работу. От отладки одного сервопривода до многоканального соединения — это поможет вам сэкономить много времени на отладку. Теперь, когда вы прочитали это, вы могли бы также спросить себя: в вашем следующем инновационном продукте, каких эффектов действия эти маленькие сервоприводы могут помочь вашему дизайну, о которых вы никогда не осмеливались думать раньше?
Время обновления: 23 марта 2026 г.
Свяжитесь со специалистом по продукции Kpower, чтобы порекомендовать подходящий двигатель или редуктор для вашего продукта.






















