


























ТЕХНИЧЕСКАЯ ПОДДЕРЖКА


Опубликовано 2026-02-15
Вы когда-нибудь сталкивались с такой ситуацией: вы хотитесервоприводавтоматически регулировать скорость в зависимости от расстояния, но вы обнаруживаете, что он либо вращается слишком медленно, чтобы не оказать никакого эффекта, либо вращается слишком быстро, как в судорогах? При использовании ультразвуковых волн для управлениясервопривод, какую скорость надо на нем поставить? Это действительно головная боль. Сегодня, как производитель, который много лет занимается интеллектуальным оборудованием, я расскажу вам об этой теме и поделюсь реальным опытом.
Сначала нам нужно понять одну вещь: как ультразвуковой датчик и рулевой механизм работают вместе. Проще говоря, ультразвуковой модуль подобен вашим глазам, которые сообщают контроллеру, как далеко находится объект впереди; исервоприводэто как ваша рука, которая должна реагировать на основе информации, увиденной глазами. Если вы хотите, чтобы скорость сервопривода регулировалась по мере изменения расстояния, ключевым моментом является установление взаимосвязи. Например, если расстояние до объекта находится в пределах 20 см, скорость вращения может быть медленнее; при расстоянии от 20 до 50 см скорость вращения средняя; когда расстояние превышает 50 см, скорость вращения самая высокая. Эта логика звучит просто, но при фактической настройке параметров следует обратить внимание на множество факторов, которые напрямую связаны с конечным эффектом.
Честно говоря, стандартного ответа на этот вопрос не существует. В основном это зависит от сценария, в котором вы его используете. Если это умный мусорный бак, скорость открытия и закрытия крышки слишком быстрая и может напугать людей, поэтому вполне подходит скорость от 30 до 45 градусов в секунду; если это камера с автоматическим слежением, скорость должна быть выше, от 60 до 90 градусов в секунду, чтобы не отставать от движущихся объектов. Я видел, как многие новички устанавливали максимальную скорость, как только начинали. В результате сервопривод издает дребезжащий звук и подвержен перегреву. Рекомендуется, исходя из реальных потребностей, сначала протестировать на низкой скорости, а затем медленно увеличивать ее, чтобы найти «правильную» точку.
Чтобы добиться регулируемой скорости, самое главное — обработать задержку или таймер в коде. Если она используется, вы можете сделать следующее: сначала прочитать значение расстояния, возвращаемое ультразвуковым модулем, а затем использовать функцию карты, чтобы сопоставить это значение с нужным вам диапазоном скоростей. Например, расстояние от 0 до 100 сантиметров соответствует скорости вращения от 0 до 90 градусов в секунду. Затем в цикле вычислите, на какое время должен быть задержан каждый шаг, исходя из этой скорости. Вот небольшая хитрость: напрямую используйте таймер () вместо задержки, чтобы сервопривод мог продолжать определять расстояние во время вращения сервопривода, и реакция была более чувствительной.
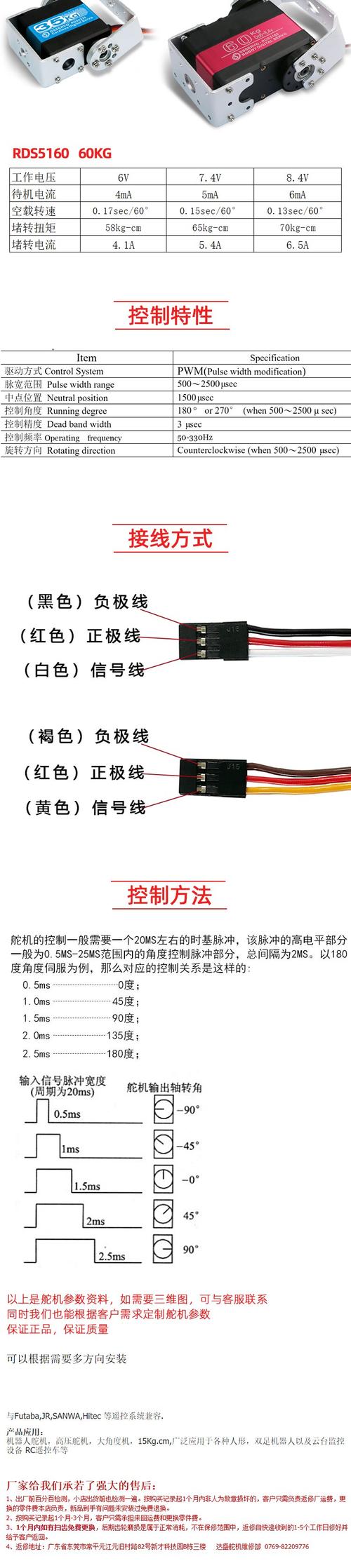
На рынке представлены различные сервоприводы, наиболее распространенными являются аналоговые и цифровые сервоприводы. Аналоговые сервоприводы принимают волны ШИМ, и их скорость относительно стабильна, но диапазон их регулировки ограничен; цифровые сервоприводы реагируют быстро и поддерживают более точный контроль скорости, но, конечно, дороже. Существуют также различия между металлическими и пластиковыми шестернями. Если вы хотите, чтобы сервопривод работал на определенной скорости в течение длительного времени, рекомендуется выбирать металлические шестерни, которые имеют гораздо лучший отвод тепла и долговечность. При выборе сервопривода не забудьте посмотреть в таблице параметров пункт «Скорость холостого хода», который является его предельной скоростью.
Вы можете не думать, что место установки ультразвукового датчика также повлияет на скорость, которую вы в конечном итоге установите. Если он установлен слишком высоко, низкие объекты могут быть не обнаружены; если он установлен слишком далеко, дальность обнаружения будет ограничена. Я предлагаю вам установить датчик и сервопривод на одном уровне, чтобы пространство, которое они видят и перемещают, было одинаковым. Еще один важный момент — не направлять датчик на гладкую стену или изогнутую поверхность, поскольку это может вызвать диффузное отражение и привести к неточным показаниям. Если показания неточные, скорость сервопривода будет меняться быстро и медленно, что будет ужасным испытанием.
Учитывая подводные камни, на которые я наступил, хочу напомнить: Первая из них — это проблема помех. Когда ультразвуковая волна и рулевой механизм используют общий источник питания, они легко влияют друг на друга, и показания будут случайным образом скакать при вращении рулевого механизма. Решение — использовать отдельный блок питания или разнести время работы в программе. Во-вторых, это задержка реакции. Когда объект движется быстро, и скорость вращения не успевает за ним, сервопривод будет работать очень медленно. В это время можно соответствующим образом увеличить частоту дискретизации или добавить в алгоритм функцию прогнозирования. Последнее — защита от перегрузки. Если держать сервопривод на высокой скорости в течение длительного времени, он может легко перегореть. Не забудьте добавить в код логику остановки по тайм-ауту.
Прочитав это, вы должны иметь представление о том, как устанавливать скорость, верно? Но я также хочу вас спросить: считаете ли вы, что при реальной отладке самое неприятное — это проблема согласования скорости или нестабильные данные датчика? Добро пожаловать, поделитесь своим опытом в области комментариев и поставьте лайк, чтобы больше друзей-мейкеров увидели эту статью!
Время обновления: 15 февраля 2026 г.
Свяжитесь со специалистом по продукции Kpower, чтобы порекомендовать подходящий двигатель или редуктор для вашего продукта.






















