


























ТЕХНИЧЕСКАЯ ПОДДЕРЖКА


Опубликовано 2026-02-26
Я думаю, что многие друзья сталкивались с этой проблемой, когда возились с роботами или самодельными гаджетами:сервоприводбыл куплен и подключен к питанию, но он просто не двигался, или тупо крутился только в одну сторону. Вы хотите, чтобы он двигался гибко, как человеческая шея, и управлял камерой или небольшой лазерной указкой, чтобы попадать куда угодно, но вы не знаете, с чего начать. Не волнуйтесь, на самом деле делаясервоприводGimbal Obedient не так сложен, как вы думаете. Сегодня поговорим о том, как управлять вращением этогосервоприводподвес.
Проще говоря, двухосный подвес может перемещаться вверх, вниз, влево и вправо, полагаясь на два сервопривода для выполнения своих функций. Одна трубка расположена в горизонтальном направлении, что мы часто называем вращением влево и вправо, а также термином «курс» или «перевод»; другая трубка находится в вертикальном направлении, то есть, когда вы поднимаете и опускаете голову, термин «подача». Сначала вы должны починить два сервопривода и построить механическую конструкцию подвеса так, чтобы они могли отвечать за одно направление, не мешая друг другу. Это похоже на человеческую шею. Он должен уметь поворачивать голову влево и вправо и кивать. Он также опирается на различные группы мышц. Поэтому первым шагом для управления вращением является определение того, в каком направлении вы хотите, чтобы подвес двигался, и что соответствует тому, какой сервопривод работает.
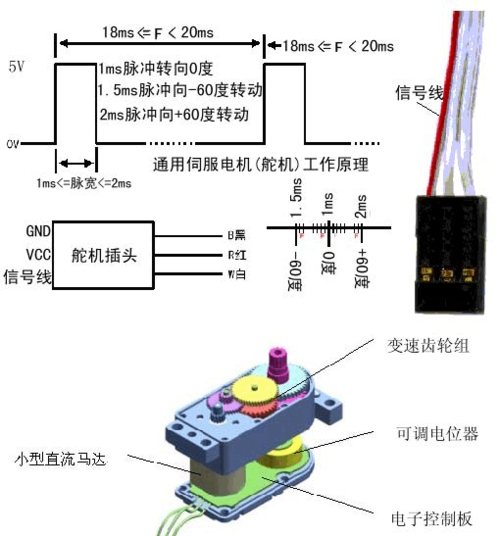
Многие новички приходят в замешательство, когда видят слова «управляющий сигнал» и «ШИМ», и чувствуют, что они очень продвинуты. На самом деле, это очень просто. Вы можете думать об этом как об отправке «команды времени» сервоприводу. Положение оси рулевого механизма определяется не напряжением, а импульсом высокого уровня длительностью несколько миллисекунд. Обычно этот импульс варьируется от 1 до 2 миллисекунд. Отправьте импульс длительностью 1 миллисекунду, и сервопривод повернется в крайнее левое положение; отправьте импульс длительностью 1,5 миллисекунды, и он повернет в середину; отправьте импульс длительностью 2 миллисекунды, и он повернется крайне вправо. Чтобы стабилизатор вращался непрерывно, ваша основная плата управления (например, STM32) должна непрерывно отправлять этот импульс 50 раз в секунду, и ширина импульса каждый раз немного меняется.
Поскольку принцип заключается в отправке импульсов, реализовать его в коде очень интуитивно понятно. На такой платформе вы можете напрямую использовать готовую «серверную библиотеку», не рассчитывая время самостоятельно. Например, если вы напишете.писать(90), он автоматически сгенерирует импульс, который может повернуть сервопривод в положение 90 градусов. Хотите, чтобы подвес медленно двигался по кругу слева направо? Напишите цикл for, чтобы медленно увеличивать угол от 0 до 180 с небольшой задержкой в середине, и подвес будет вращаться плавно. Для тех, кто плохо знаком с рулевыми механизмами, это определенно самый быстрый способ начать работу. Вам не нужно понимать, как нижний слой генерирует импульсы, вам просто нужно сказать сервоприводу, «под каким углом идти».
Если вы хотите более интуитивно чувствовать «нажатие туда, куда указываете», было бы очень интересно использовать потенциометр (такую вращающуюся ручку) для непосредственного управления стабилизатором. Потенциометр можно подключить к аналоговому входу микроконтроллера. Программа будет постоянно считывать текущее положение ручки (например, значение от 0 до 1023), а затем «сопоставлять» это значение пропорционально значению угла, требуемому сервоприводом (например, от 0 до 180). Когда вы медленно поворачиваете потенциометр рукой, сервопривод подвеса будет вращаться синхронно, как будто соединенный невидимым шатуном. Это чувство обратной связи по управлению в реальном времени даст вам более глубокое понимание «контроля».
Конечно, одного ручного управления недостаточно. Если вы хотите, чтобы подвес оставался ровным или автоматически отслеживал цель, вам необходимо использовать, например, датчик ориентации. Вы можете установить датчик на подвес, и он будет определять, наклонен ли подвес в данный момент, в режиме реального времени. Как только возникнет внешняя сила, вызывающая его искривление, программа немедленно прочитает данные об отклонении, быстро вычислит их с помощью ПИД-алгоритма, а затем немедленно отправит команду коррекции угла на рулевой механизм. Весь процесс совершается за миллисекунды, создавая ощущение, что как бы вы ни трясли основание, камера на подвесе всегда останется неподвижной и устойчивой, как гора. Эта технология автоматической стабилизации изображения широко используется в аэрофотосъемке и ручных стабилизаторах.
Я должен напомнить вам о ловушке, в которую особенно легко попасть, и это проблема с электропитанием. Когда сервопривод запускается и нагружается, мгновенный ток будет очень большим. Если для его управления вы используете обычный USB-источник питания микроконтроллера, напряжение будет мгновенно понижено, что приведет к перезагрузке микроконтроллера или непосредственному подергиванию или встряхиванию сервопривода. Поэтому не экономьте на блоке питания. Лучше всего подготовить для сервопривода внешнюю батарею или модуль стабилизации напряжения с достаточной выходной силой тока и соединить провода заземления микроконтроллера и сервопривода вместе. Только так вся система сможет работать стабильно, и можно будет использовать все ваши предыдущие коды и логику управления.
Увидев это, появилось ли у вас лучшее представление о том, как управлять вращением сервопривода и подвеса? От простой отправки импульсов до использования кода для управления углом и добавления автоматической стабилизации датчика — каждый шаг может приблизить вас на один шаг к созданию вашего творческого продукта. Хотите прямо сейчас опробовать и установить гибкую шейку на свою камеру или гаджет? Если у вас возникнут какие-либо проблемы при выборе сервопривода или проектировании конструкции, вы можете также посетить некоторые профессиональные форумы роботов или официальные сайты компаний, где есть готовые решения и проверенные продукты для справки. После стольких разговоров мне вдруг стало любопытно, для каких интересных проектов вы хотите использовать этот сервостабилизатор? Поделитесь им в комментариях, поставьте лайк, и пусть больше друзей увидят ваши идеи!
Время обновления: 26 февраля 2026 г.
Свяжитесь со специалистом по продукции Kpower, чтобы порекомендовать подходящий двигатель или редуктор для вашего продукта.






















