


























APOYO TÉCNICO


Publicado 2026-02-16
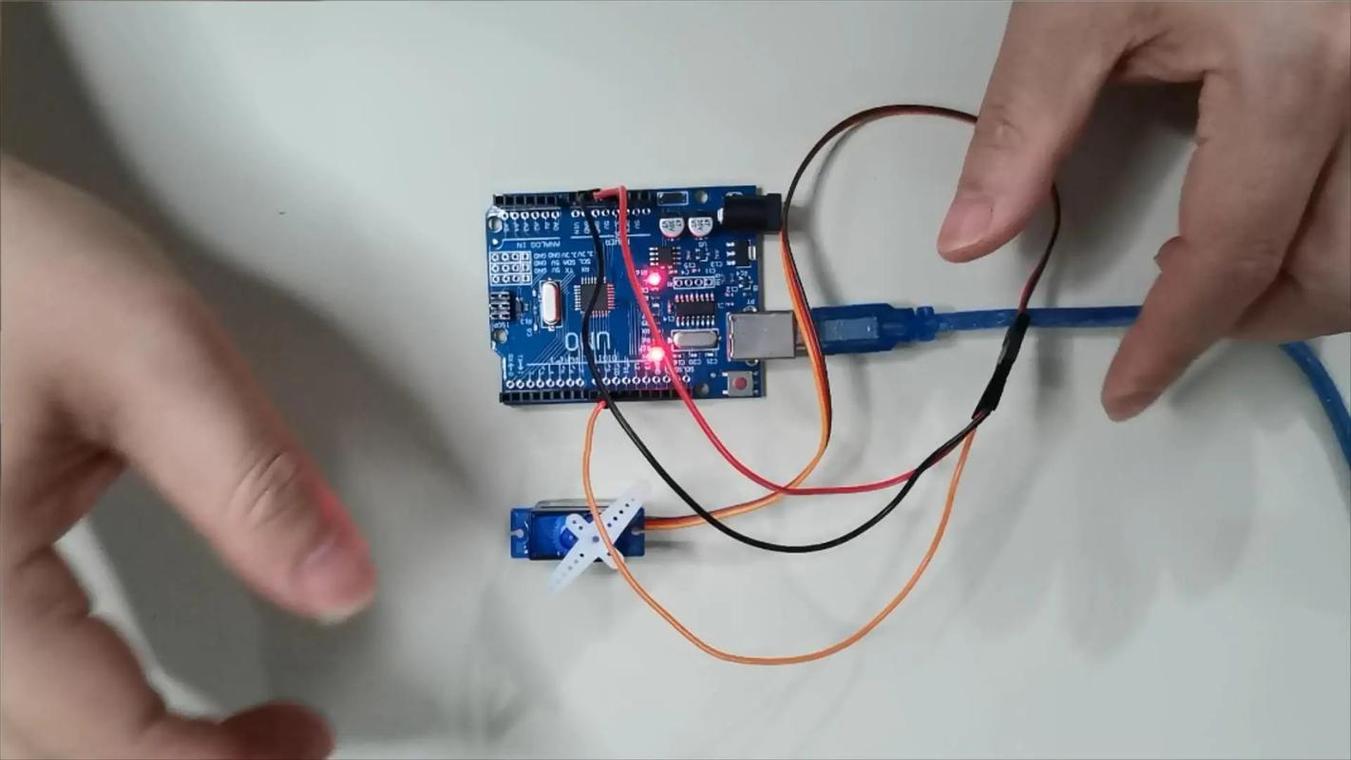
acabo de recibir elservoy quería conectarlo al microcontrolador, pero estaba confundido al mirar los tres cables. No te preocupes, este es un problema que casi todos los novatos que jueganservos encontraremos. De hecho, el cableado es más sencillo de lo que cree. Siempre que comprenda para qué sirven los tres cables y siga los pasos paso a paso, podrá estar seguro de obtener elservomoviéndose en media hora.
Los tres cables que se extienden fuera del servo suelen ser el cable de alimentación, el cable de tierra y el cable de señal. El cable de alimentación suele ser rojo y está conectado al pin de 5 V del microcontrolador para alimentar el servo. El cable de tierra es marrón o negro y está conectado al pin GND del microcontrolador para permitir que el circuito forme un bucle. La línea de señal suele ser naranja o amarilla, que está conectada al pin de salida PWM del microcontrolador y se utiliza para controlar el ángulo de rotación del servo. Comprender las funciones correspondientes a los colores es un primer paso sólido.
Si ha conectado según el color, pero el servo no se mueve, la razón más común es una fuente de alimentación insuficiente. La corriente del pin de 5 V del microcontrolador en sí es limitada y no puede controlar al gran devorador del servo. En este caso, el servo puede vibrar ligeramente pero no girar, o puede no responder en absoluto. Intente conectar una fuente de alimentación externa separada al servo, como una batería o un módulo estabilizador de voltaje, y conecte el cable de tierra de la fuente de alimentación al cable de tierra del microcontrolador. La línea de señal permanece sin cambios y, por lo general, el problema se puede solucionar.
La elección de la fuente de alimentación depende del tipo de servo que esté utilizando. Si se trata de un servo de torque pequeño ordinario, la corriente de trabajo es de varios cientos de miliamperios y se puede controlar modificándolo con algunas baterías secas o un banco de energía de teléfono móvil. Si se trata de un servo metálico de alto par, la corriente de funcionamiento puede alcanzar varios amperios, por lo que hay que considerar el uso de una batería de avión modelo especial o un módulo estabilizador de voltaje de alta potencia. La clave es observar el voltaje de trabajo nominal y la corriente de rotor bloqueado del servo. Según este parámetro, agregue un margen del 20% para que sea práctico de usar.
Una vez realizado el cableado, es hora de escribir el código. Debe enviar una onda PWM al pin donde se encuentra la línea de señal del microcontrolador, que es la señal de control necesaria para simular el servo. Generalmente, el mecanismo de dirección requiere una frecuencia de 50 Hz, lo que significa un ciclo de 20 milisegundos. En este ciclo, el tiempo de nivel alto está entre 0,5 milisegundos y 2,5 milisegundos, correspondiente a 0 grados a 180 grados del servo. Hay bibliotecas Servo listas para usar en las funciones de biblioteca de muchos microcontroladores. Puedes llamar directamente al ángulo de escritura sin tener que calcular tú mismo estos complicados tiempos.
Si quieres que el robot se mueva, un servo definitivamente no es suficiente. Cuando se cablean varios servos, el suministro de energía se convierte en un gran problema. En este momento, no piense en utilizar la fuente de alimentación del microcontrolador. Debe utilizar una fuente de alimentación externa y la fuente de alimentación debe ser lo suficientemente grande. Conecte los cables rojos de todos los servos al polo positivo de la fuente de alimentación y los cables negros juntos para conectar el polo negativo de la fuente de alimentación y la tierra común del microcontrolador. Las líneas de señal están conectadas respectivamente a diferentes pines PWM del microcontrolador. De esta forma, cada servo se puede controlar de forma independiente en el programa y dejar que funcionen juntos.
A veces se escribe el ángulo, pero la posición del servo siempre está desviada. Esto puede deberse a interferencias en la línea de señal, especialmente cuando el cableado es relativamente largo. Intente torcer el cable de señal y el cable de alimentación a tierra juntos, lo que puede producir un cierto efecto antiinterferencia. Además, el potenciómetro dentro del servo también presenta errores físicos. Puede ajustar ligeramente el rango de ancho de pulso en el código y ajustarlo para que el ángulo sea más preciso. Si no es preciso después de un uso prolongado, es posible que el servo esté desgastado y deba ser reemplazado.
Quemar algo suele deberse a demasiada corriente o a un cableado incorrecto. Asegúrese de verificar nuevamente el voltaje de la fuente de alimentación antes de realizar el cableado. Nunca conecte la fuente de alimentación de alto voltaje directamente al servo. El polo negativo de la fuente de alimentación externa que suministra energía al servo debe estar conectado al GND del microcontrolador, para que se pueda formar un nivel de referencia unificado. Al depurar el programa, primero puede colocar el servo en un ángulo medio antes de encenderlo para evitar que el servo gire repentinamente hacia abajo y cause una corriente excesiva en el momento de encenderlo. Si siente que el servo está caliente o hace ruidos anormales, corte inmediatamente la alimentación y verifique.
Espero que estos contenidos puedan ayudarle a dar con éxito el primer paso en el servocontrol de dirección. Piénselo, ¿cuál es el problema específico que más le preocupa cuando realiza el cableado o la programación? Bienvenido a charlar sobre tu experiencia en el área de comentarios. Si te resulta útil no olvides darle un me gusta y compartirlo con más amigos que lo necesiten.
Hora de actualización: 2026-02-16
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















