


























APOYO TÉCNICO


Publicado 2026-02-24
Amigos que juegan drones o fabrican robots, ¿a menudo se encuentran con este molesto problema: instalan el pequeño recién comprado?servocon grandes expectativas, sólo para descubrir que tiembla como un colador o es tan débil que ni siquiera puedes romper un trozo de plástico, o incluso "golpear" en unos pocos días? De hecho, muchas veces no es que la calidad delservoen sí es pobre, pero que no elegimos el correcto. Hoy hablaremos sobre cómo elegir el "corazoncito" más adecuado para nuestro trabajo favorito: un micro.servo.
Ante la gran variedad de servos de 9 gramos, 12 gramos o más pequeños que hay en el mercado, tu primera reacción es definitivamente confusión. ¿Qué significan los números y letras del número de modelo? En realidad es muy simple. Esto suele ser una aproximación al tamaño, peso o torque del servo. Por ejemplo, el "servo de 9 gramos" más común se refiere a su peso de unos 9 gramos. Primero debe determinar cuánto espacio de instalación requiere su trabajo y cuánta carga puede soportar y luego, basándose en este límite físico, seleccionar una gama de modelos aproximadamente adecuada. Este es el primer paso más crítico. No compres uno y te lo metas en la cabeza.
Después de delinear el modelo, hay que leer atentamente su "informe de examen físico". En la lista de parámetros, los dos indicadores más importantes son el par y la velocidad. El par determina la cantidad de fuerza y su unidad suele ser kilogramo·cm (kg·cm), lo que significa cuántos objetos se pueden alejar 1 cm del centro del eje de dirección. La velocidad se refiere al tiempo que tarda el servo en girar 60 grados, como 0,12 segundos/60 grados. Debe hacer una compensación basada en el escenario de la aplicación. Si se utiliza para las patas de un robot, necesita un par mayor; si se usa como cardán de cámara, necesita uno con velocidad uniforme y respuesta rápida. Si comprende estos dos indicadores, básicamente no realizará una compra equivocada.
Diferentes escenarios de aplicación tienen diferentes requisitos de par y velocidad para el mecanismo de dirección. Cuando se aplica a las patas del robot, se requiere un gran torque para proporcionar suficiente soporte de energía para garantizar que el robot pueda caminar, saltar y realizar otras acciones de manera estable. Para un cardán de cámara, la velocidad uniforme y la respuesta rápida son cruciales para garantizar la estabilidad y suavidad de la imagen filmada y capturar con precisión varias escenas. Sólo comprendiendo profundamente y sopesando los dos indicadores clave de par y velocidad de acuerdo con las necesidades reales podremos tomar la decisión correcta al elegir un mecanismo de dirección y evitar errores de compra debido a una comprensión inadecuada de los parámetros.
Después de instalarlo finalmente, el servo comenzó a vibrar como un "viento", lo cual fue muy frustrante. No se apresure a culpar al servo por estar roto. La mayoría de los problemas de fluctuación en realidad provienen de la "fuente de alimentación" y la "señal". El microservo es de tamaño pequeño y requiere mucha corriente en el momento del arranque. Si la fuente de alimentación no se puede alimentar o el cable es demasiado delgado, vibrará fuera de control cuando el voltaje fluctúe. Además, si la señal PWM emitida por el controlador de vuelo o el receptor es inestable, también provocará pérdidas. Puede intentar suministrar energía al servo por separado o verificar si el cable de señal del tablero de control está soldado firmemente. En muchos casos, el problema se puede solucionar fácilmente.
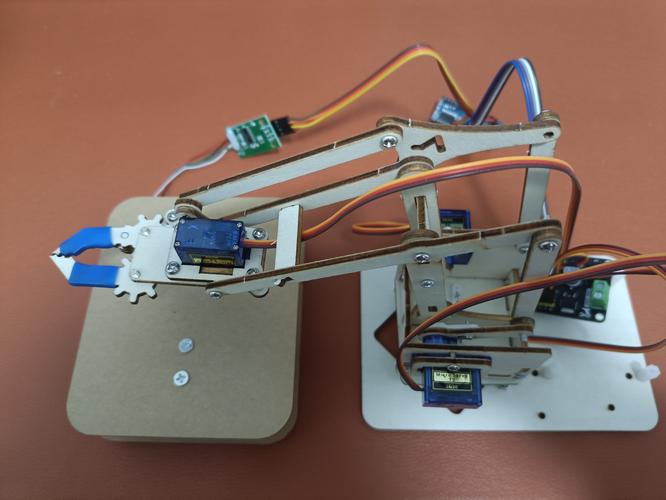
¿Cuál es la diferencia entre estos dos hermanos? En pocas palabras, los servos analógicos son como teléfonos antiguos, que tienen que esperar instrucciones constantemente; mientras que los servos digitales son como teléfonos móviles modernos: responden más rápido y procesan instrucciones de manera más eficiente. Debido a que el servo digital tiene una velocidad de procesamiento más rápida, responde más rápidamente al arrancar, tiene un posicionamiento más preciso y es más estable al mantener la energía. Eso sí, el precio es un poco más caro. Los servos analógicos son más baratos y completamente suficientes para escenarios como los alerones de aviones de ala fija que no requieren ajustes frecuentes. Si su proyecto requiere un control preciso, como un brazo robótico, los servos digitales son definitivamente la primera opción.
️Paso 1: Aclare los requisitos de su proyecto
Pregúntese primero: ¿su modelo necesita que ejerza fuerza (torsión fuerte), necesita que funcione rápido (respuesta rápida) o necesita que se mantenga firme (posicionamiento preciso)? Escriba sus necesidades principales.
️Paso 2: Mida el espacio de instalación
Utilice una regla para medir cuánto espacio queda para el servo en su equipo. Anota el largo, ancho y alto. Este tamaño físico eliminará directamente una gran cantidad de modelos inadecuados.
️Paso 3: comparar los parámetros principales
Teniendo en cuenta sus necesidades, vaya a la plataforma de comercio electrónico para buscar el modelo, centrándose en "par" y "velocidad" en la lista de parámetros. Si la fuerza y la velocidad son consistentes, confirme si el voltaje de trabajo está dentro del rango de suministro de energía de su sistema.
️Paso 4: Considere métodos de control
Confirme si la señal de salida de su controlador (control de vuelo, receptor o microcontrolador) coincide con el tipo de señal requerida por el servo (principalmente frecuencia PWM y rango de ancho de pulso). La mayoría de microservos estándar son compatibles, pero si se trata de un servo digital menos común, lo mejor es mirar más de cerca el manual.
De hecho, actualmente existen muchas imitaciones en el mercado. Si gasta dinero en comprar un producto falso, no sólo se reducirá el rendimiento, sino que también se puede quemar el equipo. La forma más segura es buscar canales oficiales, como buscar directamente en el sitio web oficial de la marca, encontrar su lista de distribuidores autorizados y comprar desde allí. Además, después de recibir la mercancía, podrá observar más de cerca el material del engranaje y la mano de obra de la carcasa del servo. Los productos originales suelen tener detalles muy finos y se sienten suaves y sin atascos al girar el eje de salida, mientras que los productos de imitación suelen tener rebabas y son astringentes al girar.
Después de hablar tanto, me pregunto cuál es el problema más difícil del mecanismo de dirección que haya encontrado al trabajar en un proyecto. ¿Es porque el tamaño de la instalación no es el adecuado o porque no se entienden los parámetros, provocando que el coche vuelque? Bienvenido a compartir su experiencia en el área de comentarios. Si crees que este artículo te resulta útil, ¡no olvides darle me gusta y compartirlo con más amigos que jueguen maker!
Hora de actualización: 2026-02-24
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















