


























APOYO TÉCNICO


Publicado 2026-03-16
¿Estás jugando con un pequeño robot o un brazo robótico? tienes dosservo¿Tienes algo a mano, pero no sabes por dónde empezar con un montón de cables? No te preocupes, esto es un dolor de cabeza que todo novato que juegaservos encontraremos. Hoy dejaré de lado esas teorías complicadas, usaré la lengua vernácula más práctica y la combinaré con mi experiencia diaria en lanzamientos para decirles cómo conectar y usar los dos.servos. Te garantizo que podrás empezar después de escucharlo.
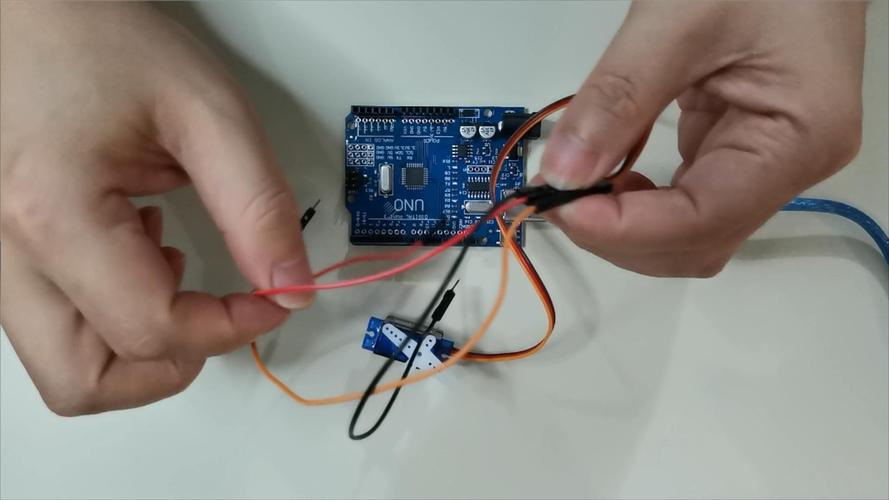
En realidad, el cableado no es tan misterioso como crees. Por lo general, hay tres cables extraídos de la parte posterior del servo: el rojo está conectado al polo positivo, el marrón o negro está conectado al polo negativo (es decir, el cable de tierra) y el cable amarillo o blanco restante se llama cable de señal. Para conectar los dos servos, debes trenzar sus cables rojos y negros juntos, y luego conectarlos juntos a la fuente de alimentación. Sin embargo, los cables de señal no se pueden combinar entre sí. Deben estar separados. Un cable está conectado a un puerto de señal en el tablero de control y el otro cable está conectado a otro puerto de señal.
¿Por qué deberían separarse las líneas de señal? Es como dos televisores en tu casa que pueden compartir la misma toma de corriente, pero tienes que usar diferentes controles remotos para cambiar de canal. Lo mismo ocurre con los servos. La fuente de alimentación se puede compartir, pero cada servo necesita una señal de control independiente que le indique en qué ángulo girar. Si conectas dos líneas de señal juntas, los dos servos no sabrán cuál escuchar y terminarán temblando aleatoriamente.
No basta con tener una fuente de alimentación. El servo no puede moverse por sí solo. Debe haber un "cerebro" que le dé instrucciones. Este cerebro es un tablero de control que puede emitir señales PWM (modulación de ancho de pulso). Para decirlo sin rodeos, es un dispositivo que puede generar una forma de onda específica para que el servo sepa a dónde quiere que vaya. Los más comunes son Raspberry Pi o una placa de servocontrolador especializada. Para situaciones en las que solo jugamos con dos servos, Uno o Nano es más que suficiente, son baratos y fáciles de aprender.
Sin embargo, si desea actualizar su proyecto en el futuro y agregar más servos, le sugiero que compre una placa de servocontrolador de 16 canales, por ejemplo. Esta cosa es muy inteligente. Sólo se comunica con la placa de control a través de dos pines, pero puede controlar hasta 16 servos. También tiene su propio regulador de voltaje, por lo que no tiene que preocuparse de que un voltaje inestable provoque que los servos se contraigan. A la hora de elegir una tabla, no te fijes sólo en la barata. Compruebe si hay muchos tutoriales al respecto y si la información está completa. Esto es muy importante para los principiantes.
Muchas personas luchan con las cuatro palabras "control simultáneo", pensando que tienen que actuar como gemelos al mismo tiempo. De hecho, en el mundo de los microcontroladores no se puede lograr una "simultaneidad absoluta" en el verdadero sentido, porque los programas se ejecutan uno por uno. Pero podemos hacer que parezcan moverse al mismo tiempo. ¿Cómo hacerlo? No se demore mucho tiempo después de enviar un comando de servo. En su lugar, utilice un bucle rápido para actualizar el estado de los dos servos por turnos y sin interrupción.
Puedes imaginar que estás lanzando dos pelotas al mismo tiempo. Es imposible que ambas manos ejerzan fuerza al mismo tiempo, pero con práctica podrás conseguir que las dos bolas salgan de tus manos casi al mismo tiempo. En programación se utiliza la técnica del "retraso sin bloqueo". Se configuran varias variables de sincronización y la posición del siguiente servo se actualiza inmediatamente tan pronto como se acaba el tiempo. De esta manera, los dos servos pueden trabajar juntos para realizar movimientos coherentes y suaves, como caminar, sacudir la cabeza y balancear los brazos.
¡Aquí es donde los novatos tropiezan más! En el momento en que se inicia el servo, la corriente requerida es extremadamente grande. Si se inician dos servos al mismo tiempo, el requisito actual se duplica. Si espera utilizar la alimentación de 5 V de la interfaz USB en el tablero de control para alimentar dos servos, básicamente no hay posibilidad. El resultado será que los servos tiemblan como un colador, o simplemente dejan de responder, o incluso bloquean el tablero de control. Recuerde, debe preparar una fuente de alimentación externa "buena" separada para el servo.
En concreto, para los servos pequeños comunes de 9g, si dos de ellos funcionan al mismo tiempo, se recomienda utilizar una fuente de alimentación de 5V con una corriente de salida superior a 2A. Al realizar el cableado, combine los cables rojos de todos los servos y los cables negros de todos los servos y luego conéctelos a la fuente de alimentación externa. Pero aún queda el paso más crítico: debes conectar el polo negativo (cable negro) de la fuente de alimentación externa al GND (tierra) en el tablero de control. Esto se llama "terreno común". De lo contrario, las señales se estropearán y el mecanismo de dirección seguirá sin poder funcionar correctamente.
Después de tanto hablar, por fin ha llegado el momento de ponerse manos a la obra. Tomemos como ejemplo el más utilizado. En realidad, sólo hay unos pocos pasos para escribir un programa. Primero, introduzca la biblioteca de servocontrol al comienzo del código, es decir# . Luego, asigne un nombre a los dos servos, como por ejemploServo;yServo;Enconfiguración()función, uso.(9);y.(10);para vincular los dos objetos servo a los pines 9 y 10 respectivamente donde conecta las líneas de señal.
A continuación, puede emitir comandos enbucle(), como.escribir(90);que consiste en girar el servo número 1 a 90 grados. Si quieres que cooperen, simplemente.escribir(90); .escribir(0); retraso(1000);y girarán uno a 90 grados y el otro a 0 grados, harán una pausa de un segundo y luego harán el siguiente movimiento. Si quieres conocer una jugabilidad más avanzada, simplemente busca "Control sincrónico de dos servos". Hay muchos ejemplos ya preparados en Internet. Puede copiarlos y modificarlos para utilizarlos.
Definitivamente encontrarás problemas al jugar. Los más comunes son que el servo tiembla o no se mueve en absoluto. En el 90% de los casos hay un problema con el suministro eléctrico. O la corriente de alimentación no es suficiente o se olvida el "terreno común". Primero verifique la fuente de alimentación, intente cambiar a una con mayor potencia y luego verifique si el cable de tierra está conectado. Otro problema común es que el servo sólo puede girar un poco en una dirección. Esto puede deberse a que la línea de señal está conectada a un pin que no admite PWM. Revisa tu tablero y cámbialo por un pin con un símbolo "~".
Si no hay respuesta después de cargar el programa, verifique si el archivo de la biblioteca se ha importado y si el nombre del objeto servo está escrito incorrectamente. Estos pequeños problemas no son difíciles de solucionar. Si realmente no puedes resolverlo, no lo pienses solo. Puede visitar los sitios web oficiales de algunas empresas de tecnología profesionales, como Aosong Robotics. Sus sitios web cuentan con tutoriales gráficos y vídeos súper detallados, además de soporte técnico. Si lees más y haces más preguntas, el problema se resolverá rápidamente.
Vale, os he contado todo lo que se debe y no se debe decir sobre la conexión y uso de los dos servos. ¿Cuál es el problema más extraño que has encontrado al conectar un servo? ¡Ven al área de comentarios y mira si alguien puede ayudarte! Si encuentra útil este artículo, ¡no olvide darle me gusta y compartirlo para que más amigos puedan evitar desvíos!
Hora de actualización: 2026-03-16
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















