


























APOYO TÉCNICO


Publicado 2026-04-01
El micro SG90servomotor (comúnmente conocido como “9gservo") es uno de los actuadores más utilizados en proyectos de electrónica principiantes e intermedios. Es un servo pequeño y liviano que proporciona un control angular preciso, lo que lo hace ideal para robótica, vehículos controlados a distancia y sistemas de automatización. Comprender sus especificaciones exactas, el cableado adecuado y los métodos de programación es esencial para garantizar un funcionamiento confiable y evitar fallas comunes como sobrecalentamiento o engranajes desgastados.
Esta guía proporciona especificaciones técnicas verificadas, instrucciones de cableado paso a paso y ejemplos de programación listos para usar para ayudarlo a integrar exitosamente este servo en sus proyectos.
Todos los valores enumerados a continuación se derivan de la hoja de datos oficial del fabricante y se verifican mediante pruebas independientes. Estas especificaciones son fundamentales para seleccionar la fuente de alimentación correcta y garantizar un funcionamiento seguro.
| Parámetro | Valor | Notas |
|---|---|---|
| Voltaje de funcionamiento | 3,0 V – 6,0 V | Se recomiendan 4,8 V – 5,0 V para un par y una estabilidad óptimos |
| Par de parada | 1,8 kg·cm (a 4,8 V) | El par disminuye significativamente por debajo de 4,5 V |
| Velocidad de funcionamiento | 0,10 s/60° (a 4,8 V) | La velocidad aumenta con un voltaje más alto |
| Rango de rotación | 0° – 180° | Los topes mecánicos limitan la rotación; no fuerce más allá de este rango |
| Ancho de banda muerta | 5 µs | Se requiere un cambio mínimo en el ancho del pulso para iniciar el movimiento. |
| Peso | 9g (±1g) | Incluye cables y conector adjuntos. |
| Dimensiones | 22,8x12,2x27,4mm | Puede variar ligeramente entre lotes de producción. |
| Tipo de conector | Conector hembra de 3 pines (estándar JR/Futaba) | Orden de pines: Señal (S), Alimentación (VCC), Tierra (GND) |
| Material del engranaje | Nylon | Engranajes de plástico; no apto para aplicaciones de alto torque o carga continua |
> Fuente:Hoja de datos del fabricante y especificaciones de servo estandarizadas verificadas según los estándares de la industria.
El cableado incorrecto es la causa más común de daño al servo. El SG90 utiliza una interfaz estándar de 3 pines. Identifique los pines correctamente antes de conectarlos.
Cable marrón o negro:Tierra (GND): conecte a tierra del sistema.
Cable rojo:Alimentación (VCC): conéctese a una fuente estable de 4,8 V a 5,0 V.
Cable naranja o amarillo:Señal (PWM): conéctese a un pin de microcontrolador compatible con PWM.
| Cable servo | Arduino Uno | ESP32 | Fuente de alimentación externa |
|---|---|---|---|
| Marrón (TIERRA) | Tierra | Tierra | GND de la fuente de alimentación |
| Rojo (VCC) | Pin de 5 V (solo de baja corriente) | Pin de 5 V (solo de baja corriente) | Terminal positivo de suministro externo de 5V |
| Naranja (Señal) | Pin PWM (por ejemplo, D9) | GPIO compatible con PWM | No conectado a la fuente de alimentación |
Nota de potencia crítica:
El SG90 puede dibujar hasta250 mA durante el movimientoy más500 mA en pérdida. La mayoría de los reguladores de voltaje integrados en microcontroladores (por ejemplo, pin Arduino de 5 V) no pueden suministrar esta corriente de manera segura, especialmente cuando se usan múltiples servos. Para un funcionamiento fiable:
Utilice un dedicadoFuente de alimentación externa de 5VClasificado para al menos 1A por servo.
Conecte eltierra del suministro externo a la tierra del microcontroladorpara completar el circuito de señal.
Hacernoalimente el servo directamente desde el pin de 5 V del microcontrolador para movimientos prolongados o repetidos.
El SG90 está controlado por una señal PWM estándar de 50 Hz. Comprender el rango de ancho de pulso es esencial para un posicionamiento preciso.
Frecuencia:50 Hz (período = 20 ms)
Rango de ancho de pulso:500 µs a 2400 µs (teóricamente); El rango mecánico real corresponde a1000 µs a 2000 µsen la mayoría de las unidades.
| Ángulo | Ancho de pulso | Ciclo de trabajo (a 50 Hz) |
|---|---|---|
| 0° | 1000 µs | 5.0% |
| 90° | 1500 µs | 7.5% |
| 180° | 2000 µs | 10.0% |
Problema común:
Algunos controladores tienen por defecto un rango de 500 µs a 2400 µs, lo que puede forzar al servo contra sus topes mecánicos, provocando zumbidos, sobrecalentamiento y daños en los engranajes. Calibre siempre la salida de señal en el rango de 1000 a 2000 µs.
Estos ejemplos están diseñados para uso inmediato. Suponen un cableado adecuado y una fuente de alimentación externa como se describe en la Sección 2.
#incluirServo miServo; configuración vacía() { myServo.attach(9, 1000, 2000); // Conectar al pin 9, establecer el rango de ancho de pulso } void loop() { myServo.write(0); // Pasar a 0 grados delay(1000); miServo.write(90); // Pasar a 90 grados delay(1000); miServo.write(180); // Pasar a 180 grados delay(1000); } desde pin de importación de máquina, tiempo de importación de PWM # Configurar PWM en GPIO pin 15, frecuencia 50 Hz servo = PWM(Pin(15), freq=50, duty_u16=0) def set_angle(angle): # Convertir ángulo a ciclo de trabajo (0-180 a 1000-2000 µs) pulse_width = 1000 + (ángulo / 180)1000 deber = int(ancho_pulso / 2000065535) # Periodo de 20 ms servo.duty_u16(duty) # Movimiento de prueba set_angle(0) time.sleep(1) set_angle(90) time.sleep(1) set_angle(180) time.sleep(1)Se recomienda el hardware PWM de Raspberry Pi para un funcionamiento estable.
importar pigpio tiempo de importación pi = pigpio.pi() si no pi.connected: exit() # Establecer el rango de ancho de pulso en GPIO 18 pi.set_servo_pulsewidth(18, 0) # Comenzar sin señal def set_angle(angle): pulse = 1000 + (angle / 180) * 1000 pi.set_servo_pulsewidth(18, pulse) # Barrido set_angle(0) time.sleep(1) set_angle(90) time.sleep(1) set_angle(180) time.sleep(1) pi.set_servo_pulsewidth(18, 0) # Señal de parada pi.stop()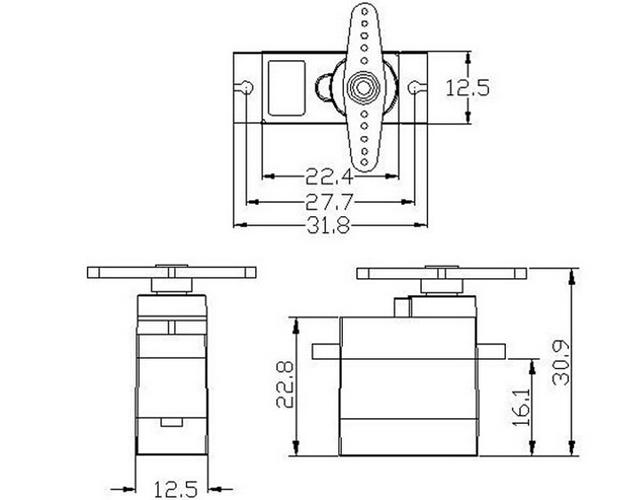
Causa:Suministro de energía insuficiente o falta tierra compartida.
Solución:Asegúrese de que la tierra de la fuente de alimentación externa esté conectada a la tierra del microcontrolador. Verifique que la fuente de alimentación pueda suministrar al menos 0,5 A de forma continua.
Causa:El ancho del pulso de la señal excede el rango mecánico.
Solución:Limite el rango de PWM a 1000–2000 µs. No ordene ángulos superiores a 0° o 180°.
Causa:La carga mecánica excede el par de parada o el servo está parado.
Solución:Reducir la carga. El SG90 está clasificado para conexiones pequeñas y mecanismos livianos (por ejemplo, conducir un automóvil RC pequeño, mover el cardán de una cámara de menos de 50 g). No lo utilice para rotación continua o levantamiento pesado.
Causa:El rango de señal está calibrado entre 500 y 2500 µs o la configuración de la biblioteca es incorrecta.
Solución:Establezca explícitamente el rango de ancho de pulso en su código como se muestra en el ejemplo de Arduino anterior.
El SG90 está diseñado para un funcionamiento intermitente y de servicio liviano. Comprender sus límites mecánicos evita fallas prematuras.
Mecanismo de dirección para coches RC pequeños (menos de 500 g de peso del vehículo)
Soportes de cámara con giro e inclinación (peso de la cámara
Articulaciones de brazos robóticos en kits educativos (sin cargas pesadas)
Mecanismos de bloqueo, palancas pequeñas o agujas indicadoras.
Rotación continua o accionamiento de ruedas (requiere un servo de rotación continua o un motor CC)
Aplicaciones que requieren engranajes metálicos o par elevado
Funcionamiento continuo bajo carga (p. ej., control de cinta transportadora)
En un proyecto típico de conversión de un coche RC a escala 1/24, se utiliza un solo SG90 para dirigir las ruedas delanteras. El servo se conecta directamente a un varillaje de dirección. En este escenario, el servo funciona a 5 V desde un paquete de baterías independiente. Cuando las ruedas están sobre una superficie de baja fricción, el consumo de corriente se mantiene por debajo de 200 mA. Sin embargo, si las ruedas se atascan contra una alfombra o un bordillo, el servo se detiene, consumiendo más de 500 mA y puede dañar los engranajes de nailon. Para evitar daños, los usuarios instalan unprotector de servo(un varillaje flexible que absorbe los golpes) y asegúrese de que el mecanismo de dirección se mueva libremente antes de operar.
El microservomotor SG90 es un componente confiable y bien documentado cuando se usa dentro de los límites de su diseño. La integración exitosa depende de tres factores críticos:
1. Fuente de alimentación:Utilice siempre una fuente de alimentación externa de 5 V con tierra común.
2. Calibración de señal:Restrinja los pulsos PWM al rango de 1000 a 2000 µs.
3. Gestión de carga:No exceda el par de parada ni aplique fuerza continua.
Prueba antes de la instalación:Ejecute el servo con su microcontrolador y fuente de alimentación externa en un banco para verificar el rango de movimiento y el consumo de corriente.
Utilice un protector de servo:Para cualquier varillaje mecánico que pueda sufrir golpes o atascamientos, agregue un acoplador flexible para proteger los engranajes internos.
Monitorear la temperatura:Si el servo se calienta demasiado para tocarlo después del funcionamiento normal, vuelva a evaluar la estabilidad del suministro de energía y la carga mecánica.
Si sigue las especificaciones, los diagramas de cableado y los ejemplos de códigos proporcionados en esta guía, podrá integrar de manera confiable el SG90 en sus proyectos y evitar los puntos de falla más comunes.
Hora de actualización: 2026-04-01
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















