


























APOYO TÉCNICO


Publicado 2026-02-16
Recientemente, un amigo estaba jugueteando con un pequeño invento y quería aplicar el método de control remoto por infrarrojos alservocontrol, pero encontró que o bien elservorotado aleatoriamente o simplemente no respondió. Creo que muchos amigos que recién comienzan se han encontrado con situaciones similares. Quieren implementar el control inalámbrico, pero están atrapados en una serie de detalles técnicos. De hecho, usandoun sensor de infrarrojos para controlar elservoes esencialmente hacer que el servo comprenda las "palabras" del control remoto. Este asunto no es tan complicado como se imagina. Aclarémoslo paso a paso.
Para que el servo obedezca obedientemente, el núcleo es establecer la relación correspondiente entre la señal infrarroja y el ángulo del servo. El código infrarrojo emitido por el mando a distancia es único cuando se pulsa cada botón. Nuestra tarea es dejar que el microcontrolador capture este código y luego lo traduzca en instrucciones que el servo pueda entender. Este proceso es como asignar una misión específica a cada botón del control remoto, como presionar "Volumen +" para hacer que el servo gire 30 grados.
En la operación real, podemos implementar este proceso de traducción a través de la programación. Cuando el receptor de infrarrojos detecta la señal, el microcontrolador la decodificará inmediatamente y consultará la tabla de programas que configuramos de antemano. Una vez que se encuentra un código coincidente, la onda PWM correspondiente se envía inmediatamente al servo para que gire al ángulo especificado. Es como equipar al servo con un par de oídos que puedan entender comandos infrarrojos.
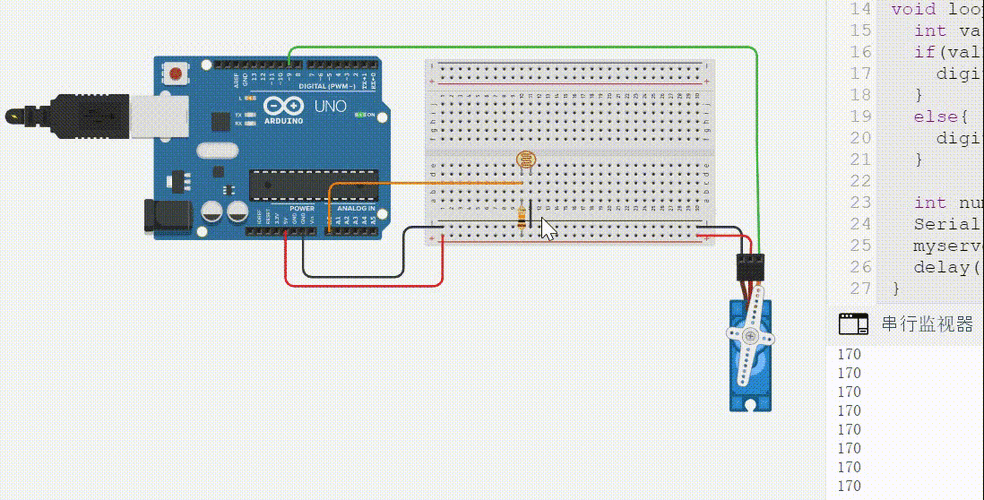
La conexión de hardware es la base de todo el sistema. Si lo conecta incorrectamente, producirá humo. En primer lugar hay que distinguir los tres pines del receptor de infrarrojos. Por lo general, VCC se conecta al polo positivo de la fuente de alimentación, GND se conecta a tierra y el pin OUT se conecta a un pin de interrupción del microcontrolador o a un puerto de E/S normal. Este pin OUT es responsable de transmitir la señal infrarroja recibida al cerebro del microcontrolador.
La conexión del servo es relativamente fija. Tiene tres cables, el marrón o negro es el cable de tierra, el rojo es el cable de alimentación y el naranja o amarillo es el cable de señal. Conecte la línea de señal al pin de salida PWM del microcontrolador. Tenga en cuenta que si la potencia del servo es grande, es mejor suministrar la energía por separado. No obtenga energía directamente del microcontrolador, de lo contrario la placa base podría quemarse fácilmente. Conecte los cables de tierra públicos entre sí para que la señal pueda transmitirse normalmente.
Hay varios receptores de infrarrojos y controles remotos en el mercado, y elegir el incorrecto dificultará la depuración. Para los amigos novatos, se recomienda elegir directamente un receptor de infrarrojos con una frecuencia portadora de 38 kHz. Por ejemplo, este es actualmente el modelo más versátil y es adecuado para la mayoría de controles remotos de electrodomésticos. En cuanto al control remoto, simplemente busque un televisor inactivo o un control remoto de decodificador en casa. No es necesario comprar uno nuevo.
Si quieres comprar tu propio mando a distancia, puedes elegir un mando a distancia pequeño con protocolo NEC. La decodificación de este protocolo es relativamente sencilla y la mayoría de los códigos ya preparados se pueden encontrar en línea. Trate de evitar elegir controles remotos con algunos protocolos impopulares; de lo contrario, el proceso de decodificación le causará dolor de cabeza. Recuerde, elegir el hardware adecuado es la mitad del éxito de su proyecto.
El código es el alma de la lógica de control, pero no tengas miedo, puedes encontrar muchos códigos básicos en línea. Primero usamos funciones de biblioteca para simplificar el proceso, como usar la biblioteca para manejar la recepción de infrarrojos y usar la biblioteca Servo para controlar el servo. Durante la inicialización, primero defina el pin receptor de infrarrojos y el pin del servo, y establezca el ángulo inicial del servo.
En la función de bucle, dejamos que el microcontrolador detecte continuamente si entra una señal infrarroja. Una vez que haya una señal, lea su valor y luego use la instrucción o if para emitir un juicio. Si el valor es para una tecla específica, deje que el servo vaya a 30 grados; si es otra llave, déjala ir a 90 grados. Después de escribir el código, cárguelo en el microcontrolador y pruébelo con el control remoto.
Cuando presiona el control remoto con grandes expectativas y descubre que el servo tiembla o responde lentamente, no dude de su vida apresuradamente. La causa más común de vibración del servo es un suministro de energía insuficiente. Especialmente cuando el servo requiere un gran par para girar, la corriente instantánea reducirá el voltaje, lo que provocará que el microcontrolador se reinicie. Intente alimentar el servo por separado o conecte un condensador grande en paralelo a ambos extremos de la fuente de alimentación para estabilizar el voltaje.
Otra causa común es la interferencia de la señal infrarroja. Si hay luces fuertes u otros dispositivos de infrarrojos cerca, la recepción puede verse afectada. Asegúrese de que el receptor de infrarrojos no esté bloqueado y que el control remoto esté frente a él. También se puede agregar al código algún procesamiento antirrebote, como un ligero retraso antes de la ejecución después de detectar la señal, para eliminar la posibilidad de una activación falsa.
Una vez que puedas controlar un servo con un botón, definitivamente querrás tocar algo más complejo. Por ejemplo, utilice un control remoto para controlar múltiples servos o lograr una regulación de velocidad continua. En realidad, esto no es difícil. Podemos utilizar diferentes botones del mando a distancia para controlar diferentes servos. Por ejemplo, el botón 1 controla el servo A y el botón 2 controla el servo B. No interfieren entre sí y cada uno realiza sus funciones.
Si desea controlar que el servo gire continuamente, puede definir dos teclas, una para aumentar el ángulo y otra para disminuirlo. Cada vez que se presiona una tecla, el ángulo cambia de 5 a 10 grados, lo que permite un ajuste fino. Incluso puedes diseñar un programa que permita al servo ejecutar automáticamente un conjunto de procedimientos de acción preestablecidos después de recibir una secuencia específica de teclas, haciendo que un dispositivo simple sea instantáneamente inteligente.
Al ver esto, ¿ya te pica y quieres probarlo de inmediato? De hecho, este método de juego es especialmente adecuado para su uso en la modificación de coches inteligentes, cabezales de cámara o brazos robóticos. Me gustaría preguntarles a todos, en su proyecto creativo, ¿qué tipo de acción interesante prefieren usar el control remoto por infrarrojos para controlar el servo? Bienvenido a dejar un mensaje en el área de comentarios para compartir sus maravillosas ideas. Si este artículo te resulta útil, ¡no olvides darle me gusta y compartirlo con más amigos que lo necesiten!
Hora de actualización: 2026-02-16
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















