


























APOYO TÉCNICO


Publicado 2026-03-30
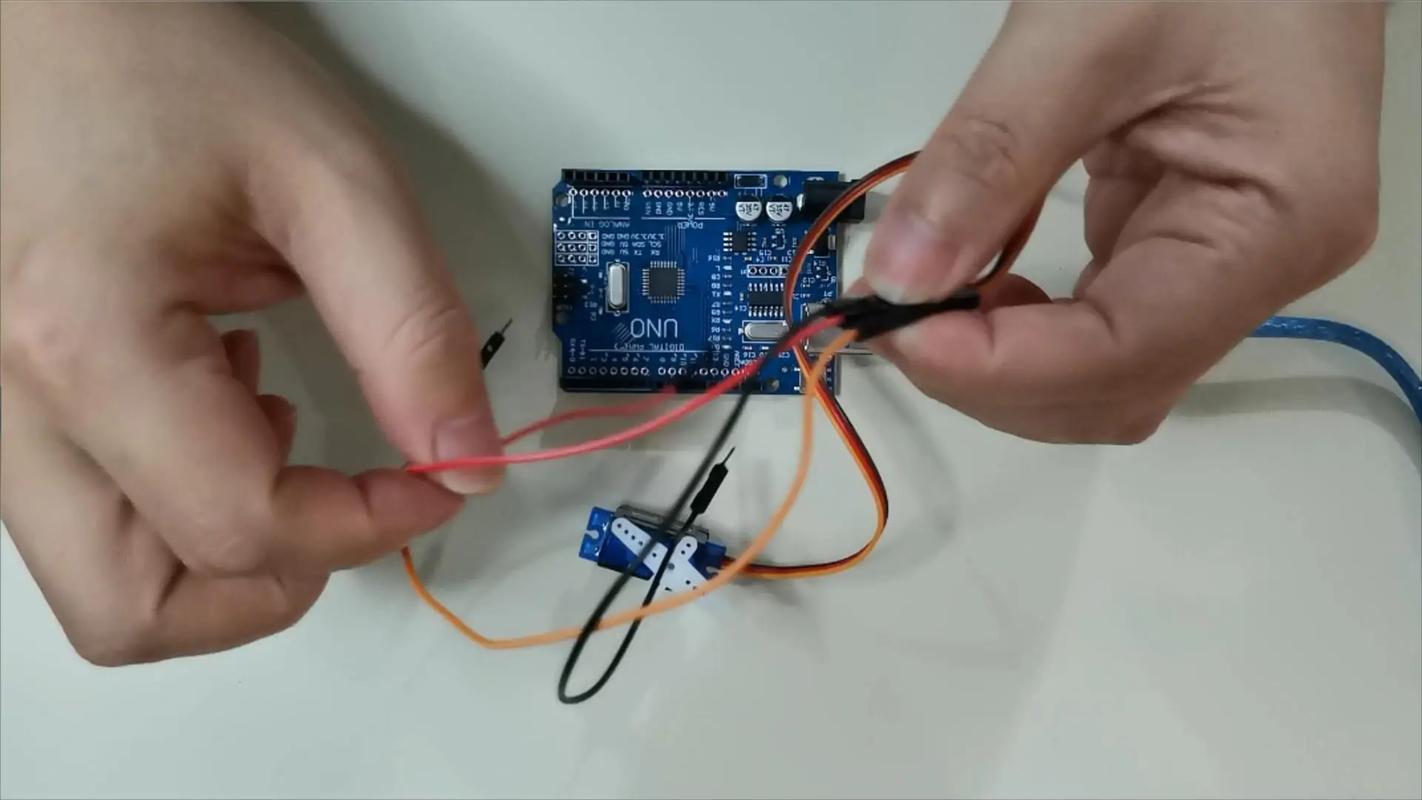
Consigue unservoy verá tres cables que salen de la parte posterior. Los colores suelen ser muy uniformes: el rojo es el polo positivo de la fuente de alimentación, conectado a 5V; marrón o negro es el cable de tierra, que es el polo negativo; Naranja o amarillo es el cable de señal, utilizado para transmitir pulsos de control. No lo hagas al revés. El rojo está conectado al positivo, el negro al negativo y el naranja a la señal. Recuerda esta fórmula y no entrarás en pánico. algunos baratosservoLos modelos pueden tener diferentes colores. Por ejemplo, el blanco se utiliza como línea de señal. Luego lee el manual o utiliza un multímetro para probarlo. Pero la mayoría estándarservoSigamos esta regla de color, así que siéntete libre de usarla.
Si todavía tienes miedo de realizar una conexión incorrecta, puedes consultar la etiqueta en la carcasa del servo. Muchos de ellos tendrán impresos tres símbolos "+", "-" y "S". S es la línea de señal. No importa si no encuentras la etiqueta, solo recuerda las combinaciones más comunes: rojo en el medio, marrón y naranja en ambos lados. Obtenga una placa de pruebas y algunos cables DuPont, conecte los cables de alimentación y de tierra primero y conecte el cable de señal al final. De esta manera, incluso si se invierte la conexión, el servo no se quemará inmediatamente, porque no girará aleatoriamente sin una señal. Sea valiente y cuidadoso, se familiarizará con él después de probarlo varias veces.
Muchos principiantes conectan directamente los cables rojo y negro del servo a los 5 V y GND del microcontrolador y luego descubren que el microcontrolador se reinicia o el servo tiembla violentamente. Esto se debe a que la corriente cuando se inicia el servo es muy grande y la capacidad de salida de 5 V en las placas de microcontroladores comunes es limitada, generalmente solo unos pocos cientos de miliamperios. La corriente de trabajo de un servo de 9 gramos puede alcanzar 200-300 mA, y más de dos matarán directamente el microcontrolador. Entonces, el enfoque correcto es: suministrar la fuente de alimentación al servo por separado, no a través del microcontrolador.
Necesita una fuente de alimentación externa de 5 V, como una caja de batería más dos baterías de litio 18650 (reducidas a 5 V) o un cabezal de carga de 5 V/2 A. Conecte el polo positivo de la fuente de alimentación al cable rojo del servo y el polo negativo al cable negro del servo. Al mismo tiempo, conecte el polo negativo de la fuente de alimentación al GND del microcontrolador. Este es un "terreno común". La línea de señal todavía está conectada únicamente al puerto IO del microcontrolador. De esta forma, el servo toma energía de la fuente de alimentación externa, y el microcontrolador solo se encarga de enviar señales. Los dos no interfieren entre sí y el funcionamiento es estable.
La línea de señal debe conectarse al pin del microcontrolador que admite la salida PWM. PWM es modulación de ancho de pulso, lo que simplemente significa que puede generar ondas cuadradas de diferentes anchos y niveles altos. El servo depende de este ancho de pulso para decidir a qué ángulo girar. Los pines PWM de diferentes microcontroladores son diferentes: 3, 5, 6, 9, 10, 11 en Uno; casi todos los pines de ESP32/ESP32 pueden simular PWM; 51 microcontrolador necesita usar su propio temporizador. Verifique el esquema de su placa y no haga conexiones aleatorias.
Al realizar la conexión, tenga en cuenta: primero escriba el programa para que el pin emita una señal PWM de 50 Hz (período de 20 ms). El tiempo de nivel alto de 0,5 ms corresponde a 0 grados, 1,5 ms corresponde a 90 grados y 2,5 ms corresponde a 180 grados. Muchos principiantes conectan la línea de señal al puerto IO digital normal y luego descubren que el servo no se mueve o tiembla aleatoriamente. Es porque no hay señal PWM. Si no está seguro de qué pin se puede utilizar, abra el IDE y seleccione "Ejemplo→Servo→Barrido". Se utiliza el pin número 9 predeterminado, por lo que definitivamente no te equivocarás si lo sigues.
El concepto de tierra común puede parecer misterioso para muchas personas cuando lo escuchan por primera vez. En realidad, es muy simple: ya sea que uses una fuente de alimentación externa para alimentar el servo o los 5 V que vienen con el microcontrolador, los polos negativos (GND) de todos los dispositivos deben estar conectados entre sí con cables. Si no está conectado, el voltaje de la señal enviada por el microcontrolador flotará en relación con la tierra del servo y el servo no podrá entender cuántos grados desea que gire. Esto es como dos personas hablando, una usa centímetros y la otra usa pulgadas, pero los números no coinciden. Un terreno común es un estándar de referencia unificado.
Al realizar el cableado, puedes usar una placa para conectar el GND del microcontrolador, el polo negativo de la fuente de alimentación externa y el cable negro del servo en la misma fila de orificios. O utilice un cable DuPont para conectar directamente el GND del microcontrolador al polo negativo de la fuente de alimentación. Preste atención al orden: conecte primero el cable de tierra común, luego conecte el cable de señal y el polo positivo de la fuente de alimentación. Desarrollar este hábito puede prevenir muchos problemas extraños. Hay muchos casos en los que los servos tiemblan, no giran o giran al azar. Al final, después de comprobarlo una y otra vez, simplemente nos olvidamos de compartir el terreno. Este hilo le ahorra tres horas de resolución de errores.
Después de conectar los cables y grabar el programa, el servo no respondió en absoluto. No se preocupe, verifique en orden: primer paso, verifique el voltaje de la fuente de alimentación. Utilice un multímetro para medir si hay aproximadamente 5 V entre la línea roja y la línea negra del servo. Si es inferior a 4,5 V, es posible que el servo no arranque. El segundo paso es ver si el cable a tierra común está suelto. Conecte y desconecte nuevamente el cable común. Muchas veces es un mal contacto en la protoboard. El tercer paso es confirmar que el pin que seleccionó realmente emite la señal PWM. Eche un vistazo con un osciloscopio o analizador lógico, si no, intente cambiar los pines.
Si el servo hace clic pero no gira, es posible que la carga sea demasiado pesada. Haga palanca suavemente en el brazo del servo con las manos para ver si está atascado. También es posible que el rango de ancho de pulso sea incorrecto. Por ejemplo, su programa envía de 0,5 ms a 2,5 ms, pero el servo en realidad requiere de 0,7 ms a 2,3 ms. Esto se puede solucionar modificando los valores de pulso mínimo y máximo en el código. La última situación: el servo está roto. Prueba a cambiar el servo. Si el nuevo puede girar, entonces el viejo está quemado. Por lo general, el servo se quema porque el voltaje excede los 6 V o el cable de señal está conectado al revés.
Controlar el servo es lo más fácil gracias a la biblioteca de servos ya preparada. Abra el IDE y haga clic en "Proyecto → Cargar biblioteca → Servo". Escribe cuatro líneas de código:# presenta la biblioteca,Servo;crea el objeto,.(9);une el pin 9,.escribir(90);Gira el servo a 90 grados. Colóquelos en la función de configuración y el servo girará inmediatamente a la posición media después de cargarlos. Si quieres balancearte hacia adelante y hacia atrás, escribe.escribir(0); retraso(1000); .escribir(180); retraso(1000);en el bucle.
Nota: La biblioteca Servo ocupará el temporizador. Si utiliza otras funciones que requieren una sincronización precisa al mismo tiempo, puede haber conflictos. En este momento, puede cambiar al control directo PWM, usandoNo funciona porque su frecuencia es incorrecta. Una mejor manera es usar.()y dar el valor del microsegundo directamente. Por ejemplo, 1500 microsegundos corresponden a 90 grados. Además, no envíe nuevos comandos con frecuencia cuando el servo esté girando. Deja más de 200 milisegundos para que llegue. Después de dominar estas pocas líneas de código, ya podrás controlar la mayoría de los servos estándar.
¿Alguna vez se ha encontrado con una situación en la que el servo vibra violentamente o emite un silbido después de conectarse? Comparta su experiencia con el cableado en el área de comentarios. El que tenga más Me gusta te ayudará a solucionar el problema de forma remota.
Hora de actualización: 2026-03-30
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















