


























الدعم الفني


تم النشر 2026-03-23
هل سبق لك أن واجهت هذا الموقف: اشتريت مايكرومضاعفات مضاعفاتوأراد أن يكتب برنامجا للسيطرة عليه. ومع ذلك، بعد البحث عبر الإنترنت لفترة طويلة، إما أن الكود لم يعمل أو تعذر تثبيت المكتبة؟ لا تقلق، سنتحدث اليوم عن كيفية استخدام الرقم 3 للحصول على هذا الصغير وجعله مطيعًا في مشاريعك الإبداعية.
تركيبه الموجز ونظامه البيئي الغني بالمكتبة يجعله خيارًا ممتازًا للتطوير السريع للنماذج الأولية. من خلال التحكم في الماكينات الصغيرة، لا تحتاج إلى الاهتمام بتفاصيل السجلات الأساسية مثل لغة C. يمكنك جعل المؤازرة تدور ببضعة أسطر من التعليمات البرمجية. هذه مجرد قشة منقذة للحياة للتحقق السريع في مرحلة ابتكار المنتج. علاوة على ذلك، يمكن دمجه بسهولة مع الوظائف المتقدمة مثل التعرف البصري وتحليل البيانات، مما يجعل جهاز التوجيه لم يعد مجرد مشغل بسيط، بل جزء من النظام الذكي.
الحلول السائدة في السوق هي RPi.GPIO و.
إذا كنت تستخدم Raspberry Pi، فإن RPi.GPIO هو الخيار الأكثر وضوحًا. يمكنه تشغيل دبابيس GPIO مباشرة لتوليد إشارات PWM. ومع ذلك، تجدر الإشارة إلى أن هذه الحزمة لديها بعض القيود في دعم دقة PWM، والتي يمكن أن تتسبب بسهولة في اهتزاز المؤازرة.
وبالمقارنة، تبدو حزمة Servo أكثر احترافية. يستخدم جهاز PWM أو برنامج PWM للتحكم بدقة في عرض النبضة، بحيث يدور المؤازرة بسلاسة وسلاسة. يوصى باستخدام هذه الحزمة لأن تغليفها أكثر اكتمالاً، ويدعم التحكم المتزامن في العديد من الماكينات، كما أن كتابة الكود أكثر أناقة.
الخطوة الأولى هي التأكد من تثبيت 3 الخاص بك بنجاح. ثم اكتب بالضبط:بيب3 --سيرفوفي المحطة. سيؤدي تنفيذ هذا الأمر إلى تثبيت جميع المكتبات والتبعيات المطلوبة بشكل كامل.
1. إذا كنت تستخدم Raspberry Pi، فأنت بحاجة أيضًا إلى تمكين وظيفة I2C أو PWM للأجهزة. يمكنك فتح الواجهة المقابلة في raspi-. 2. عند إجراء توصيلات الأجهزة، انتبه بشكل خاص إلى الأسلاك الثلاثة للمؤازرة: يجب توصيل السلك البني بـ GND، ويجب توصيل السلك الأحمر بمصدر طاقة 5 فولت، ويجب توصيل السلك البرتقالي بدبوس التحكم GPIO. تأكد من عدم توصيله بشكل عكسي، وإلا فقد يتم حرق المؤازرة. يوصى باستخدام مصدر طاقة خارجي 5 فولت كمصدر طاقة. لا تأخذ الطاقة مباشرة من دبابيس Raspberry Pi، لأن التيار لن يكون كافيًا.
الكود التالي لديه وظيفة جعل المؤازرة تتأرجح ذهابًا وإيابًا في نطاق من 0 درجة إلى 180 درجة. أولا، استخدمسبورةوcom.pwmioلتهيئة قناة PWM لبناء بيئة أساسية لتشغيل السيرفو. بعد ذلك، قم بإنشاءمضاعفاتكائن لتسهيل التحكم الدقيق في المؤازرة. من بينها، النقطة الأساسية هي بيان المهمة مثلزاوية المؤازرة = 0من خلال هذا البيان، يمكن ضبط الزاوية التي يريد السيرفو أن يدور بها بمرونة. بمعنى، كم درجة تريد أن يدور المؤازرة، يمكنك منحها الدرجة المقابلة. إذا كنت تريد أن يتحرك المؤازرة بشكل أبطأ حتى تتمكن من ملاحظة دورانه بشكل أكثر وضوحًا، فيمكنك إضافةtime.sleepبيان لتحقيق هذا الهدف.
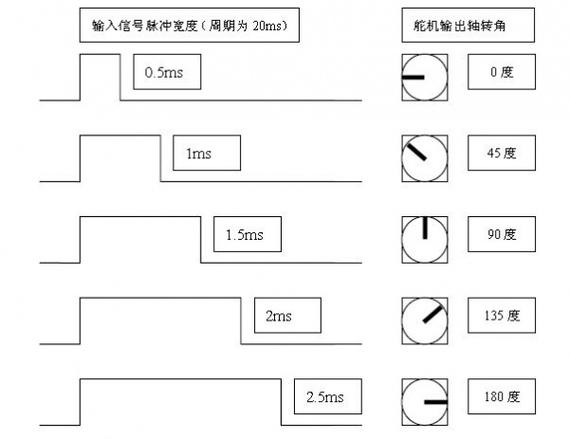
إذا أصدر المؤازرة ضوضاء غير طبيعية، فعادةً ما تكون هناك مشكلة في تردد النبض. فترة PWM القياسية للميكروسيرفو هي 20 مللي ثانية. عندما يكون الوقت عالي المستوى في نطاق 0.5 مللي ثانية إلى 2.5 مللي ثانية، تكون الزاوية المقابلة من 0 إلى 180 درجة. تقوم المكتبة بإعداد المعلمة افتراضيًا، لذلك ليست هناك حاجة للمستخدم لحساب القيم ذات الصلة بنفسه.
عندما يتطلب المشروع العديد من الماكينات للعمل معًا، مثل صنع ذراع آلية أو روبوت متعدد المفاصل، يكون استخدام المكتبة أمرًا مريحًا بشكل خاص. تحتاج فقط إلى إنشاء متعددةمضاعفاتالكائنات، كل منها مرتبط بدبوس GPIO مختلف، ثم قم بتعيين زواياها بشكل فردي. هناك خدعة صغيرة: عند الاستخدامcom.pwmio.، يضعاضبط على 50، وهو التردد القياسي للسيرفو. إذا كان هذا النوع من لوحات توسيع PWM، فإن الرمز هو نفسه تقريبًا. ما عليك سوى تغيير عنوان I2C للتحكم في 16 خدمة في وقت واحد، وهو مناسب جدًا للمشاريع المعقدة.
أفاد العديد من الأصدقاء أن المؤازرة توقفت فجأة عن الحركة أو أن الزاوية لم تكن صحيحة. السبب الأكثر شيوعا هو مشكلة إمدادات الطاقة. يمكن أن يصل التيار اللحظي للميكروسيرفو إلى أكثر من 1A. إذا تم تنشيط العديد من الماكينات في نفس الوقت، فسيؤدي انخفاض الجهد الفوري إلى إعادة تشغيل Raspberry Pi. الحل هو استخدام مصدر طاقة منظم منفصل لتشغيل المؤازرة، ويجب توصيل السلك الأرضي بأرض Raspberry Pi. مأزق آخر هو نطاق الزاوية. الحد الميكانيكي لبعض الموديلات هو 0-120 درجة فقط. إذا أجبرته على إعطائه أمرًا بزاوية 180 درجة، فسوف يتعطل صندوق التروس ويصدر صوت "نقرة". في هذا الوقت، قم بإيقاف تشغيل الطاقة على الفور وتحقق من المعلمات المحددة لنموذج المؤازرة.
من خلال التحكم في أجهزة المؤازرة الصغيرة، فإنك في الواقع تقوم بتحويل إبداعك بسرعة إلى عمل متحرك. بدءًا من تصحيح الأخطاء المؤازر الفردي وحتى الارتباط متعدد القنوات، يمكن أن يساعدك ذلك في توفير الكثير من وقت التصحيح. الآن بعد أن قرأت هذا، ربما تسأل نفسك أيضًا: في منتجك المبتكر التالي، ما نوع تأثيرات الحركة التي يمكن لهذه الماكينات الصغيرة أن تساعد تصميمك على تحقيقها والتي لم تجرؤ على التفكير فيها من قبل؟
وقت التحديث:2026-03-23






















