


























الدعم الفني


تم النشر 2026-04-01
مايكرو SG90مضاعفاتالمحرك (يشار إليه عادة باسم "9gمضاعفات") هو أحد المحركات الأكثر استخدامًا على نطاق واسع في مشاريع الإلكترونيات للمبتدئين والمتوسطين. إنه مؤازر صغير وخفيف الوزن يوفر تحكمًا زاويًا دقيقًا، مما يجعله مثاليًا للروبوتات والمركبات التي يتم التحكم فيها عن بعد وأنظمة التشغيل الآلي. يعد فهم مواصفاته الدقيقة والأسلاك المناسبة وطرق البرمجة أمرًا ضروريًا لضمان التشغيل الموثوق به وتجنب الأعطال الشائعة مثل ارتفاع درجة الحرارة أو تجريد التروس.
يوفر هذا الدليل مواصفات فنية تم التحقق منها وتعليمات الأسلاك خطوة بخطوة وأمثلة برمجة جاهزة للاستخدام لمساعدتك على دمج هذه المؤازرة بنجاح في مشاريعك.
جميع القيم المذكورة أدناه مستمدة من ورقة البيانات الرسمية للشركة المصنعة وتم التحقق منها من خلال اختبارات مستقلة. تعتبر هذه المواصفات ضرورية لاختيار مصدر الطاقة الصحيح وضمان التشغيل الآمن.
| المعلمة | قيمة | ملحوظات |
|---|---|---|
| جهد التشغيل | 3.0 فولت – 6.0 فولت | يوصى بـ 4.8 فولت - 5.0 فولت للحصول على عزم دوران وثبات مثاليين |
| عزم الدوران المماطلة | 1.8 كجم · سم (عند 4.8 فولت) | ينخفض \u200b\u200bعزم الدوران بشكل ملحوظ أقل من 4.5 فولت |
| سرعة التشغيل | 0.10 ثانية/60 درجة (عند 4.8 فولت) | تزداد السرعة مع ارتفاع الجهد |
| نطاق الدوران | 0° – 180° | توقف ميكانيكي يحد من الدوران. لا قوة خارج هذا النطاق |
| عرض الفرقة الميتة | 5 ميكرو ثانية | الحد الأدنى من تغيير عرض النبض المطلوب لبدء الحركة |
| وزن | 9 جرام (±1 جرام) | يتضمن الأسلاك المرفقة والموصل |
| أبعاد | 22.8 × 12.2 × 27.4 ملم | قد تختلف قليلاً بين دفعات الإنتاج |
| نوع الموصل | رأس أنثى ذو 3 سنون (معيار JR/Futaba) | ترتيب الدبوس: الإشارة (S)، الطاقة (VCC)، الأرضي (GND) |
| مادة العتاد | نايلون | التروس البلاستيكية غير مناسب لتطبيقات التحميل المستمر أو عزم الدوران العالي |
> مصدر:تم التحقق من ورقة بيانات الشركة المصنعة ومواصفات المؤازرة الموحدة وفقًا لمعايير الصناعة.
الأسلاك غير الصحيحة هي السبب الأكثر شيوعًا لتلف المؤازرة. يستخدم SG90 واجهة قياسية ذات 3 أسنان. تحديد الدبابيس بشكل صحيح قبل الاتصال.
السلك البني أو الأسود:الأرضي (GND) – الاتصال بأرضية النظام.
السلك الأحمر:الطاقة (VCC) - قم بالتوصيل بمصدر ثابت 4.8 فولت - 5.0 فولت.
السلك البرتقالي أو الأصفر:الإشارة (PWM) - قم بالاتصال بدبوس قادر على التحكم في PWM.
| سلك سيرفو | اردوينو أونو | ESP32 | مصدر الطاقة الخارجي |
|---|---|---|---|
| براون (GND) | أرض | أرض | GND لإمدادات الطاقة |
| الأحمر (VCC) | دبوس 5 فولت (التيار المنخفض فقط) | دبوس 5 فولت (التيار المنخفض فقط) | محطة إيجابية للإمداد الخارجي 5V |
| برتقالي (إشارة) | دبوس PWM (على سبيل المثال، D9) | GPIO قادر على PWM | غير متصل بمصدر الطاقة |
ملاحظة الطاقة الحرجة:
يمكن لـ SG90 أن يصل إلى250 مللي أمبير أثناء الحركةوأكثر500 مللي أمبير في المماطلة. لا تستطيع معظم منظمات الجهد الموجودة على متن المتحكم الدقيق (على سبيل المثال، Arduino 5V pin) توفير هذا التيار بشكل آمن، خاصة عند استخدام أجهزة متعددة. لتشغيل موثوق:
استخدام مخصصمصدر طاقة خارجي 5 فولتتم تصنيفها على الأقل 1A لكل مؤازرة.
قم بتوصيلأرض العرض الخارجي لأرض متحكملإكمال دائرة الإشارة.
يفعللاقم بتشغيل المؤازرة مباشرة من دبوس 5V الخاص بوحدة التحكم الدقيقة من أجل حركات ممتدة أو متكررة.
يتم التحكم في SG90 بواسطة إشارة PWM قياسية تبلغ 50 هرتز. يعد فهم نطاق عرض النبض أمرًا ضروريًا لتحديد المواقع بدقة.
تكرار:50 هرتز (الفترة = 20 مللي ثانية)
نطاق عرض النبض:500 ميكروثانية إلى 2400 ميكروثانية (نظريًا)؛ النطاق الميكانيكي الفعلي يتوافق مع1000 ميكروثانية إلى 2000 ميكروثانيةعلى معظم الوحدات.
| زاوية | عرض النبض | دورة العمل (عند 50 هرتز) |
|---|---|---|
| 0° | 1000 ميكروثانية | 5.0% |
| 90° | 1500 ميكروثانية | 7.5% |
| 180° | 2000 ميكرو ثانية | 10.0% |
مشكلة شائعة:
تتراوح بعض وحدات التحكم افتراضيًا بين 500 - 2400 ميكرو ثانية، مما قد يجبر المؤازرة على التوقف الميكانيكي، مما يتسبب في طنين وارتفاع درجة الحرارة وتلف التروس. قم دائمًا بمعايرة إخراج الإشارة إلى نطاق 1000-2000 ميكروثانية.
تم تصميم هذه الأمثلة للاستخدام الفوري. ويفترضون توصيل الأسلاك بشكل صحيح ومصدر طاقة خارجي كما هو موضح في القسم 2.
#يشملسيرفو مايسيرفو; إعداد باطلة() { myServo.attach(9, 1000, 2000); // أرفق بالدبوس 9، اضبط نطاق عرض النبضة } void Loop() { myServo.write(0); // الانتقال إلى 0 درجة تأخير (1000)؛ myServo.write(90); // الانتقال إلى 90 درجة تأخير (1000)؛ myServo.write(180); // الانتقال إلى 180 درجة تأخير (1000)؛ } من دبوس استيراد الجهاز، وقت استيراد PWM # تكوين PWM على GPIO pin 15، التردد 50 هرتز servo = PWM(Pin(15), freq=50, Duty_u16=0) def set_angle(angle): # تحويل الزاوية إلى دورة العمل (0-180 إلى 1000-2000 μs)pulse_width = 1000 + (angle / 180)1000 واجب = int(pulse_width / 2000065535) # فترة 20 مللي ثانية servo.duty_u16(duty) # اختبار حركة الحركة set_angle(0) time.sleep(1) set_angle(90) time.sleep(1) set_angle(180) time.sleep(1)يوصى باستخدام PWM لأجهزة Raspberry Pi للتشغيل المستقر.
import pigpio import time pi = pigpio.pi() if not pi.connected:exit() # اضبط نطاق عرض النبض على GPIO 18 pi.set_servo_pulsewidth(18, 0) # ابدأ بدون إشارة def set_angle(angle):pulse = 1000 + (angle / 180) * 1000 pi.set_servo_pulsewidth(18,pulse) # Sweep set_angle(0) time.sleep(1) set_angle(90) time.sleep(1) set_angle(180) time.sleep(1) pi.set_servo_pulsewidth(18, 0) # إشارة التوقف pi.stop()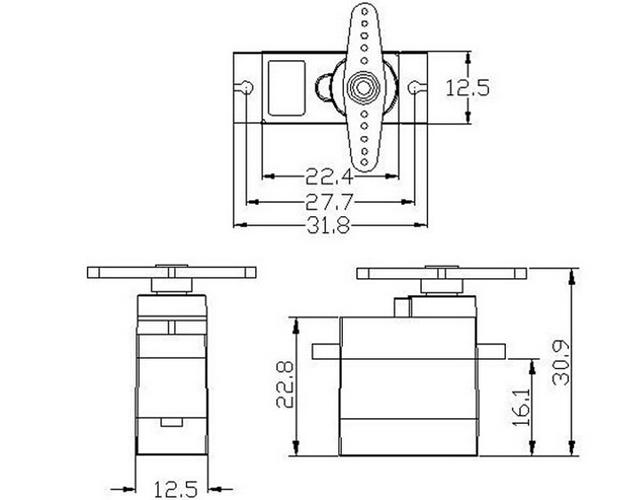
سبب:إمدادات الطاقة غير كافية أو الأرض المشتركة مفقودة.
حل:تأكد من توصيل أرض إمداد الطاقة الخارجية بأرضية وحدة التحكم الدقيقة. تأكد من أن مصدر الطاقة يمكنه توصيل 0.5 أمبير على الأقل بشكل مستمر.
سبب:يتجاوز عرض نبض الإشارة النطاق الميكانيكي.
حل:الحد من نطاق PWM إلى 1000-2000 ميكروثانية. لا تحكم بزوايا تتجاوز 0 درجة أو 180 درجة.
سبب:يتجاوز الحمل الميكانيكي عزم الدوران المتوقف، أو أن المؤازرة متوقفة.
حل:تقليل الحمل. تم تصنيف SG90 للروابط الصغيرة والآليات خفيفة الوزن (على سبيل المثال، توجيه سيارة RC صغيرة، وتحريك كاميرا ذات محورين أقل من 50 جم). لا تستخدم للدوران المستمر أو رفع الأحمال الثقيلة.
سبب:تتم معايرة نطاق الإشارة إلى 500-2500 ميكروثانية أو إعدادات المكتبة غير الصحيحة.
حل:قم بتعيين نطاق عرض النبض بشكل واضح في الكود الخاص بك كما هو موضح في مثال Arduino أعلاه.
تم تصميم SG90 للتشغيل الخفيف والمتقطع. إن فهم حدودها الميكانيكية يمنع الفشل المبكر.
آلية التوجيه لسيارات RC الصغيرة (أقل من وزن السيارة 500 جرام)
حوامل كاميرا قابلة للإمالة (وزن الكاميرا
مفاصل الذراع الآلية في المجموعات التعليمية (بدون حمولات ثقيلة)
آليات القفل أو الرافعات الصغيرة أو إبر المؤشر
الدوران المستمر أو القيادة بالعجلات (يتطلب محركًا مؤازرًا للدوران المستمر أو محرك DC)
التطبيقات التي تتطلب تروس معدنية أو عزم دوران عالي
التشغيل المستمر تحت الحمل (على سبيل المثال، التحكم في الحزام الناقل)
في مشروع تحويل سيارة RC نموذجي بمقياس 1/24، يتم استخدام SG90 واحد لتوجيه العجلات الأمامية. يتصل المؤازرة مباشرة بوصلة التوجيه. في هذا السيناريو، يعمل المؤازرة بجهد 5 فولت من حزمة بطارية منفصلة. عندما تكون العجلات على سطح منخفض الاحتكاك، يبقى سحب التيار أقل من 200 مللي أمبير. ومع ذلك، إذا ارتبطت العجلات بسجادة أو رصيف، فإن المؤازرة تتوقف، وتسحب أكثر من 500 مللي أمبير وقد تؤدي إلى تجريد التروس المصنوعة من النايلون. لمنع الضرر، يقوم المستخدمون بتثبيت ملفالتوقف المؤازر(وصلة مرنة تمتص الصدمات) وتضمن تحرك آلية التوجيه بحرية قبل التشغيل.
يعد محرك سيرفو الصغير SG90 مكونًا موثوقًا وموثقًا جيدًا عند استخدامه ضمن حدود التصميم الخاصة به. يعتمد التكامل الناجح على ثلاثة عوامل حاسمة:
1. مزود الطاقة:استخدم دائمًا مصدرًا خارجيًا بجهد 5 فولت مع أرضية مشتركة.
2. معايرة الإشارة:تقييد نبضات PWM على نطاق 1000-2000 ميكروثانية.
3. إدارة الأحمال:لا تتجاوز عزم الدوران المماطلة أو تطبق قوة مستمرة.
اختبار قبل التثبيت:قم بتشغيل المؤازرة باستخدام وحدة التحكم الدقيقة ومصدر الطاقة الخارجي على مقعد للتحقق من نطاق الحركة والسحب الحالي.
استخدم جهاز التوقف المؤازر:بالنسبة لأي وصلة ميكانيكية قد تتعرض لصدمة أو ربط، قم بإضافة قارنة توصيل مرنة لحماية التروس الداخلية.
مراقبة درجة الحرارة:إذا أصبح المؤازرة ساخنة للغاية بحيث لا يمكن لمسها بعد التشغيل العادي، فأعد تقييم استقرار مصدر الطاقة والحمل الميكانيكي.
باتباع المواصفات ومخططات الأسلاك وأمثلة التعليمات البرمجية الواردة في هذا الدليل، يمكنك دمج SG90 بشكل موثوق في مشاريعك وتجنب نقاط الفشل الأكثر شيوعًا.
وقت التحديث: 2026-04-01






















