


























الدعم الفني


تم النشر 2026-03-12
لقد كنت أعمل على التحكم في جهاز التوجيه لفترة من الوقت، وقد مررت بمزالق أكثر مما أكلته. في البداية اعتقدت أنه سيتحول عندما أقوم بتوصيله بإشارة PWM، لكن النتيجة كانت إما أنه يهتز مثل مرض باركنسون أو لا يمكنه الدوران إلى الزاوية التي أردتها. في وقت لاحق، هدأت وأجريت عدة جولات من التجارب، ثم وجدت بعض الأدلة. سأشارككم اليوم بعض الأفكار العملية لمساعدتك على تجنب الانعطافات.
عند أول اتصال لكمضاعفاتبالتأكيد سترتبك هذه المصطلحات. لا تقلق، دعنا نحللها ونلقي نظرة. إن جهاز التوجيه هو في الأساس "نظام حلقة مغلقة صغير" يدمج محرك DC، ومعدات التخفيض، ولوحة التحكم. تعطيه إشارة نبضية، ويكتشف الزاوية الحالية من خلال مقياس الجهد الداخلي ويقارنها بموضع الهدف المحفوظ. إذا لم يكن صحيحا، فإنه سيتم تدويره حتى تتم محاذاته.
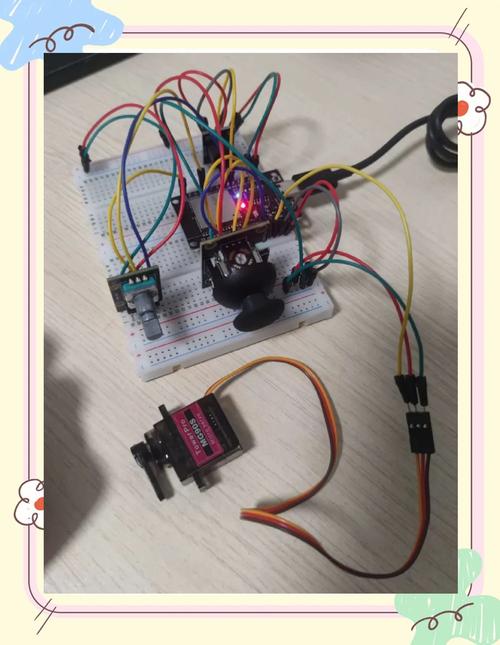
ما فعلته في ذلك الوقت كان غبيًا جدًا ولكنه فعال جدًا: لقد تناولت 9 جرامًا رخيصًامضاعفاتوفككته ونظرت إليه. عندما رأيت مقياس الجهد يدور مع عمود الإخراج بأم عيني، فهمت على الفور ما هي ردود الفعل. ثم استخدمت مرسمة الذبذبات لإلقاء نظرة على إشارة التحكم ووجدت أن الوقت عالي المستوى يتراوح من 0.5 مللي ثانية إلى 2.5 مللي ثانية، أي ما يعادل 0 درجة إلى 180 درجة. أصبح المنطق واضحا على الفور.
يبدو البرنامج بسيطًا، ما عليك سوى إرسال PWM، ولكن ليس من السهل تحقيق الاستقرار. في البداية، استخدمت برنامج تأخير لمحاكاة PWM. ونتيجة لذلك، تم تدوير المؤازرة واحدة تلو الأخرى. نظرًا لأن وحدة التحكم الدقيقة كان عليها القيام بأعمال أخرى، فقد تمت مقاطعة التأخير. في وقت لاحق، تم استبداله بمقاطعة مؤقت، وتم تخصيص مؤقت للأجهزة خصيصًا لتوليد موجات PWM، وأصبح المؤازرة سلسة على الفور.
هناك تفاصيل أخرى قد تغفل عنها: حالة منفذ GPIO في لحظة التشغيل. إذا كان خرج دبوس وحدة التحكم الدقيقة غير مؤكد عند بدء تشغيله، فسوف يهتز المؤازرة بعنف، مما قد يسبب صدمة على الأقل، أو يلحق الضرر بالهيكل الميكانيكي في أسوأ الأحوال. الحل الذي أقترحه هو: أولاً قم بسحب جميع الأطراف المرتبطة بالمؤازرة إلى مستوى منخفض عند التشغيل، ثم قم بإحضارها ببطء إلى الزاوية المستهدفة بعد اكتمال التهيئة. هذه الخدعة فعالة بشكل خاص.
عند الحديث عن الارتعاش، هناك الكثير من الحيل هنا. المشكلة الأكثر شيوعًا هي مصدر الطاقة. The current when the servo is started can soar to 1A or even higher. إذا لم يتمكن مصدر الطاقة من التعامل معه وانخفض الجهد، فسيتعين إعادة تشغيل وحدة التحكم الدقيقة الموجودة على لوحة التحكم. لقد استخدمت بنك طاقة للهاتف المحمول لتشغيل جهاز مؤازر واحد، وكان مستقرًا جدًا.
الشيء الآخر الذي يمكن التغاضي عنه بسهولة هو التداخل على خط الإشارة. خاصة عندما يكون كابل المؤازرة طويلًا نسبيًا، تعمل إشارة PWM كهوائي وتكون عرضة لضوضاء الاقتران. الحل بسيط أيضًا: استخدم زوجًا ملتويًا لخط الإشارة، أو اسحبه مباشرة إلى الأرض باستخدام مقاومة 1 كيلو، والتي يمكن أن تمنع الارتعاش بشكل فعال. أيضًا، إذا كان تردد PWM الخاص بك بعيدًا جدًا عن 50 هرتز (الفترة 20 مللي ثانية) التي يتطلبها المؤازرة، فسيؤدي ذلك أيضًا إلى تحكم غير دقيق.
هناك جميع أنواع الماكينات في السوق، وإذا اخترت المشروع الخاطئ، فسوف يذهب عملك سدى. انظر أولاً إلى عزم الدوران، والذي يرتبط ارتباطًا مباشرًا بقدرته على دفع حملك. عادةً ما أحسب عزم الدوران المطلوب للحمل وأترك هامشًا بنسبة 30٪. على سبيل المثال، إذا كنت تريد صنع ذراع آلية، فإن المفصل البعيد يتطلب أصغر عزم دوران، لذلك يجب أن تكون القاعدة أكبر بعدة مرات.
ثم انظر إلى السرعة باستخدام مؤشر ثانية/60 درجة. على سبيل المثال، 0.12 ثانية/60 درجة أسرع من 0.18. لكن عليك أن تدرك أن عزم الدوران والسرعة غالبًا ما يكونان متناقضين، وأن أولئك الذين لديهم عزم دوران أكبر عادة ما يكونون أبطأ. آخر شيء هو جهد العمل وحجمه. عليك أن ترى ما إذا كانت اللوحة الخاصة بك قادرة على تحمل تكاليفها وما إذا كان من الممكن تركيب الأجزاء الهيكلية. تعتمد متانة التروس المعدنية ورخص التروس البلاستيكية على ميزانيتك وسيناريوهات التطبيق.
إذا كنت ترغب في صنع روبوت، فيجب عليك التحكم في العديد من الماكينات في نفس الوقت. لا يوجد سوى عشرات من منافذ الإدخال والإخراج في كتلة واحدة. التحكم المباشر ممكن من الناحية النظرية، ولكن من الناحية العملية لا يمكن التعامل معه، ويكون تيار البدء مرتفعًا جدًا في نفس الوقت. نهجي هو استخدام لوحة تحكم مؤازرة، مثل لوحة واجهة I2C هذه، والتي يمكنها إدارة 16 قناة. يرسل عنصر التحكم الرئيسي الأوامر فقط، ويتم إنشاء كل PWM بواسطته.
يجب عليك أيضًا الانتباه إلى البرنامج. لا تدع جميع الماكينات تقفز من 0 درجة إلى 180 درجة في نفس الوقت. يمكن للتيار أن يقطع مصدر الطاقة الخاص بك. لقد قمت "ببداية متدرجة" في الكود، حيث قمت بتحريك خطوة مؤازرة واحدة فقط كل 20 مللي ثانية، أو باستخدام طريقة البدء البطيء للسماح لهم "بالصعود" ببطء إلى الموضع المستهدف، بحيث يكون التيار ألطف بكثير.
أسوأ درس تعلمته هو أن مصدر الطاقة كان متصلاً بشكل عكسي. فقط عندما كان هناك دخان أدركت أن الماكينات العادية لا تتمتع بحماية الاتصال العكسي. تعلمت لاحقًا ربط الثنائيات على سلك الطاقة أو العمل على القابس. التصميم المقاوم للخداع مهم جدًا. هناك أيضًا حد ميكانيكي. يجب أن تكون الزاوية محدودة في البرنامج، وإلا فإن المؤازرة سوف تصطدم بالحائط وسوف ينهار الترس قريبًا.
بالإضافة إلى ذلك، عند تصحيح الأخطاء، لا تنظر فقط إلى الكود، بل انتبه أكثر للتجميع الميكانيكي. في إحدى المرات، كان المؤازرة تهتز طوال الوقت، وبعد معاناة مع البرنامج لمدة ثلاثة أيام، وجدت أخيرًا أن برغي قضيب التوصيل كان مفكوكًا وكانت الفجوة كبيرة جدًا. منذ ذلك الحين، اكتسبت عادة: التحقق أولاً من الآلات، ثم التحقق من الدائرة، وأخيراً نقل الكود. لقد وفر لي هذا التسلسل الكثير من الوقت.
ما هي أغرب مشكلة واجهتها مع التحكم المؤازر؟ دعونا نتحادث في منطقة التعليقات ودعنا ندرس معًا. إذا وجدت أنه مفيد، قم بإعجابه وشاركه مع المزيد من الأصدقاء، حتى يتمكن الجميع من العمل في المشروع بسلاسة!
وقت التحديث: 12-03-2026






















