


























テクニカルサポート


発行済み 2026-03-23
こんな状況に遭遇したことはありませんか?マイクロを購入しました。サーボ サーボそしてそれを制御するプログラムを書きたいと思いました。しかし、長時間オンラインで検索した結果、コードが機能しなかったか、ライブラリをインストールできませんでしたか?心配しないでください。今日は、3 を使用してこの小さな男を取得し、創造的なプロジェクトで従順にする方法について説明します。
簡潔な構文と豊富なライブラリ エコシステムにより、ラピッド プロトタイピング開発に最適です。マイクロサーボを制御することで、C言語のように基盤となるレジスタの詳細を気にする必要がなくなります。わずか数行のコードでサーボを回転させることができます。これは、製品革新段階での迅速な検証のための単なる命を救うストローにすぎません。さらに、視覚認識やデータ分析などの高度な機能と簡単に組み合わせることができ、ステアリングギアを単なるアクチュエーターではなく、インテリジェントシステムの一部とします。
市場の主流のソリューションは、RPi.GPIO と です。
Raspberry Pi を使用している場合は、RPi.GPIO が最も簡単な選択です。 GPIO ピンを直接操作して PWM 信号を生成できます。ただし、このパッケージには PWM 精度のサポートに一定の制限があり、サーボが振動しやすくなる可能性があることに注意してください。
それに比べて、Servo パッケージはよりプロフェッショナルに見えます。ハードウェアPWMまたはソフトウェアPWMを使用してパルス幅を正確に制御し、サーボが滑らかで滑らかに回転します。このパッケージの使用は、カプセル化がより完全で、複数のサーボの同時制御をサポートし、コードの記述がより洗練されているため、使用することをお勧めします。
最初のステップは、3 が正常にインストールされていることを確認することです。次に、正確に次のように入力します。pip3 --サーボターミナル内で。このコマンドを実行すると、必要なライブラリと依存関係がすべて完全にインストールされます。
1. Raspberry Pi を使用している場合は、I2C またはハードウェア PWM 機能も有効にする必要があります。 raspi-で対応するインターフェースを開くことができます。 2. ハードウェア接続を行うときは、サーボの 3 本のワイヤに特に注意してください。茶色のワイヤは GND に接続する必要があり、赤色のワイヤは 5V 電源に接続する必要があり、オレンジ色のワイヤは GPIO 制御ピンに接続する必要があります。逆に接続するとサーボが焼損する恐れがありますのでご注意ください。電源として外部 5V 電源を使用することをお勧めします。電流が十分ではないため、Raspberry Pi ピンから直接電源を取らないでください。
以下のコードはサーボを0度から180度の範囲で前後に振る機能を持っています。まず、使用しますボードそしてpwmioPWM チャネルを初期化して、サーボの動作のための基本環境を構築します。次に、サーボサーボの正確な制御を容易にするオブジェクト。その中でもポイントとなるのが、 のような代入文です。サーボ角度 = 0このステートメントにより、サーボが回転したい角度を柔軟に設定できます。つまり、サーボを何度回転させたいかに対応する角度を与えることができます。サーボの回転をより明確に観察できるように、サーボをよりゆっくりと動かしたい場合は、時間.睡眠この目的を達成するための声明。
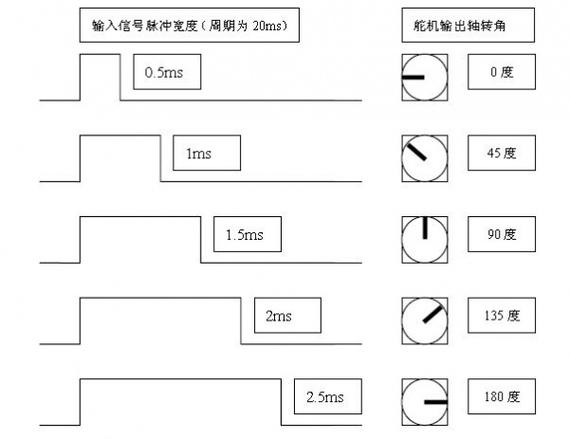
サーボから異音が発生する場合は、パルス周波数に問題があることがほとんどです。マイクロサーボの標準 PWM 周期は 20ms です。ハイレベル時間が 0.5ms ~ 2.5ms の範囲にある場合、対応する角度は 0 ~ 180 度になります。ライブラリはデフォルトでこのパラメータ設定を使用するため、ユーザーが関連する値を自分で計算する必要はありません。
ロボット アームや多関節ロボットの作成など、複数のサーボを連携させる必要があるプロジェクトでは、ライブラリを使用すると特に便利です。複数作成するだけですサーボオブジェクトをそれぞれ異なる GPIO ピンにバインドし、角度を個別に設定します。ちょっとしたコツがあります:使用するときううみお。、 置くサーボの標準周波数である50に設定します。この手のPWM拡張ボードであればコードはほぼ同じです。 I2C アドレスを変更するだけで 16 個のサーボを一度に制御できるため、複雑なプロジェクトに非常に適しています。
多くの友人が、サーボが突然動かなくなったり、角度が正しくなかったりすると報告しました。最も一般的な理由は電源の問題です。マイクロサーボの瞬間電流は 1A 以上に達することがあります。複数のサーボが同時にアクティブになっている場合、瞬間的な電圧降下により Raspberry Pi が再起動します。解決策は、サーボに電力を供給するために別の安定化電源を使用し、アース線を Raspberry Pi のアースに接続することです。もう 1 つの落とし穴は角度範囲です。一部のモデルの機械的限界は 0 ~ 120 度のみです。無理に180度の指令を与えるとギアボックスが固着して「カチッ」という音が鳴ります。このときは、すぐに電源を切り、サーボモデルの特定のパラメータを確認してください。
マイクロサーボサーボを制御することで、実際にあなたの創造性をすぐに動く作品に変えることができます。単一サーボのデバッグからマルチチャンネルリンクまで、デバッグ時間を大幅に節約できます。これを読んだところで、次の革新的な製品では、これらの小さなサーボが、これまで思いつかなかったような、どのような動作効果を設計で実現できるか、と自問したほうがよいでしょう。
更新時間:2026-03-23






















