


























SUPORTE TÉCNICO


Publicado 2026-02-16
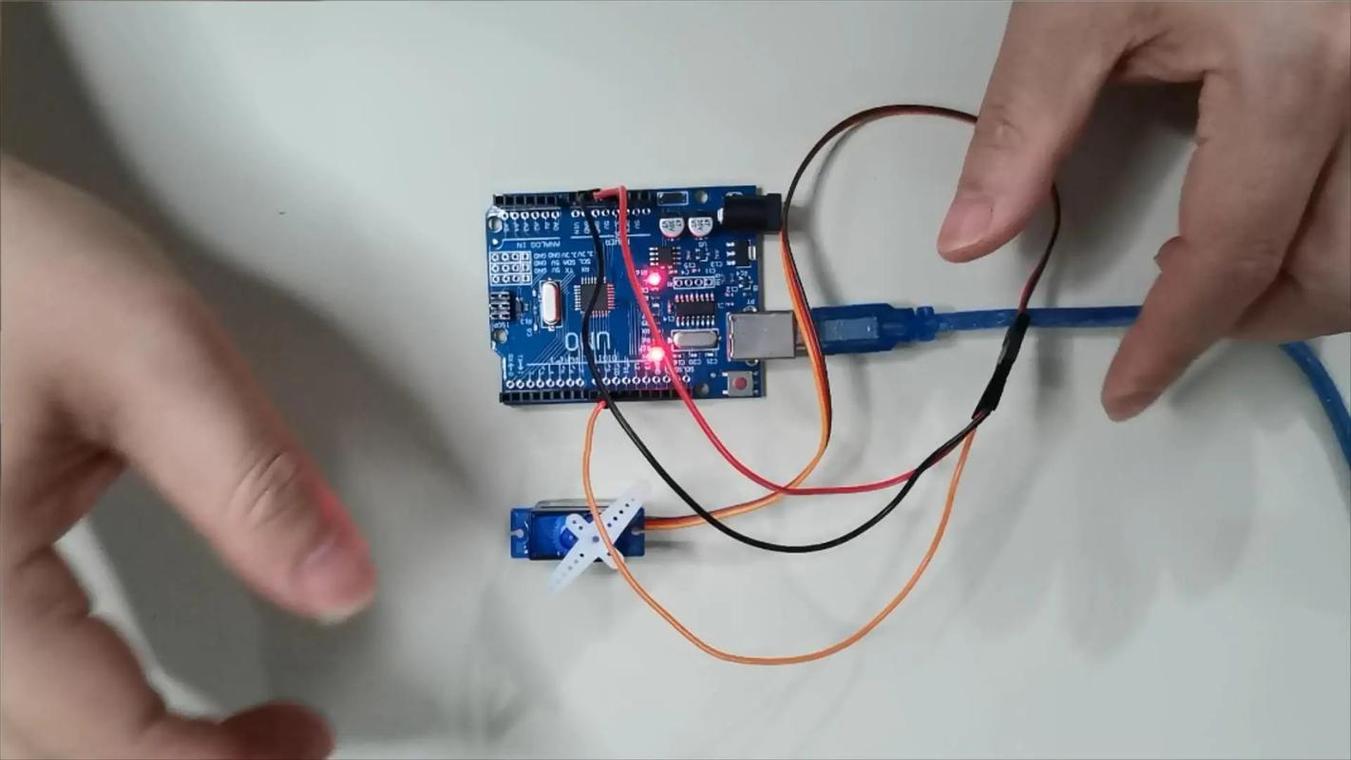
Acabei de receber oservoe queria conectá-lo ao microcontrolador, mas fiquei confuso olhando os três fios? Não se preocupe, este é um problema que quase todo novato que jogaservos vai encontrar. Na verdade, a fiação é mais simples do que você pensa. Contanto que você entenda para que servem os três fios e siga as etapas passo a passo, você pode ter certeza de obter oservomovendo-se dentro de meia hora.
Os três fios que saem do servo são geralmente o fio de alimentação, o fio terra e o fio de sinal. O fio de alimentação geralmente é vermelho e está conectado ao pino de 5V do microcontrolador para alimentar o servo. O fio terra é marrom ou preto e é conectado ao pino GND do microcontrolador para permitir que o circuito forme um loop. A linha de sinal geralmente é laranja ou amarela, conectada ao pino de saída PWM do microcontrolador e usada para controlar o ângulo de rotação do servo. Compreender as funções correspondentes às cores é um primeiro passo sólido.
Se você conectou de acordo com a cor, mas o servo não se move, o motivo mais comum é fonte de alimentação insuficiente. A corrente do pino de 5 V do próprio microcontrolador é limitada e não pode acionar o grande comedor do servo. Neste caso, o servo pode vibrar levemente, mas não girar, ou pode nem responder. Tente conectar uma fonte de alimentação externa separada ao servo, como uma bateria ou módulo de estabilização de tensão, e conecte o fio terra da fonte de alimentação ao fio terra do microcontrolador. A linha de sinal permanece inalterada e o problema geralmente pode ser resolvido.
A escolha da fonte de alimentação depende do tipo de servo que você está usando. Se for um servo de pequeno torque comum, a corrente de trabalho é de várias centenas de miliamperes e pode ser acionada modificando-o com algumas baterias secas ou um banco de energia de telefone móvel. Se for um servo de metal de alto torque, a corrente de operação pode atingir vários amperes, então você deve considerar o uso de uma bateria especial para modelo de avião ou um módulo estabilizador de tensão de alta potência. A chave é observar a tensão nominal de trabalho e a corrente de rotor travado do servo. De acordo com este parâmetro, adicione uma margem de 20% para facilitar o uso.
Depois de feita a fiação, é hora de escrever o código. Você precisa enviar uma onda PWM para o pino onde a linha de sinal do microcontrolador está localizada, que é o sinal de controle necessário para simular o servo. Geralmente, o mecanismo de direção requer uma frequência de 50 Hz, o que significa um ciclo de 20 milissegundos. Neste ciclo, o tempo de alto nível está entre 0,5 milissegundos e 2,5 milissegundos, correspondendo a 0 graus a 180 graus do servo. Existem bibliotecas Servo prontas nas funções de biblioteca de muitos microcontroladores. Você pode chamar diretamente o ângulo de escrita sem ter que calcular você mesmo esses tempos complicados.
Se você deseja que o robô se mova, um servo definitivamente não é suficiente. Ao conectar vários servos, a fonte de alimentação se torna um grande problema. Neste momento, não pense em usar a fonte de alimentação do microcontrolador. Você deve usar uma fonte de alimentação externa e a fonte de alimentação deve ser grande o suficiente. Conecte os fios vermelhos de todos os servos ao pólo positivo da fonte de alimentação e os fios pretos para conectar o pólo negativo da fonte de alimentação e o terra comum do microcontrolador. As linhas de sinal são conectadas respectivamente a diferentes pinos PWM do microcontrolador. Desta forma, cada servo pode ser controlado de forma independente no programa e deixá-los trabalhar juntos.
Às vezes o ângulo é escrito, mas a posição do servo é sempre desviada. Isto pode ser devido a interferência na linha de sinal, especialmente quando a fiação é relativamente longa. Tente torcer o fio de sinal e o fio terra de alimentação juntos, o que pode ter um certo efeito anti-interferência. Além disso, o potenciômetro dentro do servo também apresenta erros físicos. Você pode ajustar ligeiramente a faixa de largura de pulso no código e ajustá-la para tornar o ângulo mais preciso. Se não for preciso após uso prolongado, pode ser que o próprio servo esteja desgastado e precise ser substituído.
A queima de algo geralmente é causada por muita corrente ou fiação incorreta. Certifique-se de verificar novamente a tensão da fonte de alimentação antes de fazer a fiação. Nunca conecte a fonte de alimentação de alta tensão diretamente ao servo. O pólo negativo da fonte de alimentação externa que fornece energia ao servo deve ser conectado ao GND do microcontrolador, para que um nível de referência unificado possa ser formado. Ao depurar o programa, você pode primeiro colocar o servo em um ângulo médio antes de ligá-lo para evitar que o servo gire repentinamente para baixo e cause corrente excessiva no momento de ligar. Se você sentir que o servo está quente ou fazendo ruídos anormais, desligue imediatamente a energia e verifique.
Espero que este conteúdo possa ajudá-lo a dar o primeiro passo com sucesso no controle do servo de direção. Pense bem: qual é o problema específico que mais o incomoda quando você está conectando ou programando? Bem-vindo a conversar sobre sua experiência na área de comentários. Se você achar útil, não esqueça de curtir e compartilhar com mais amigos que precisam.
Hora de atualização: 16/02/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















