


























SUPORTE TÉCNICO


Publicado 2026-03-21
Quando muitas pessoas entram em contato com modelos de aeronaves ou projetos de robôs pela primeira vez, ficam presas na mesma pergunta: como conectar oservoe receptor? Comprei um monte de equipamentos, mas não sei onde conectá-los. Fico ainda mais confuso quando olho os termos em inglês no manual. Na verdade, conectar oservopara o receptor não é tão complicado. Contanto que você descubra a ordem dos três fios e a definição do canal do receptor, você poderá fazer isso em alguns minutos.
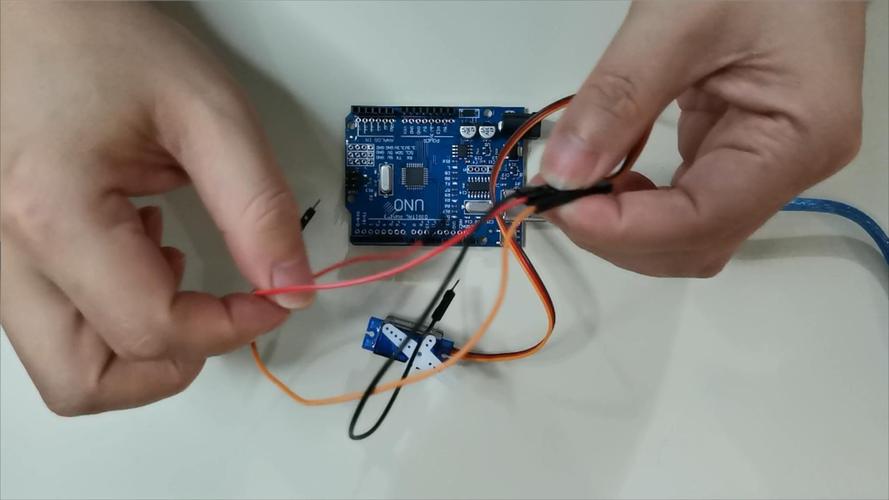
As cores dos três fios que saem da cauda do servo geralmente são fixas. O vermelho é o fio positivo, responsável por alimentar o motor e a placa de circuito interna do servo. O preto ou marrom é o fio negativo, que é o fio terra. A linha laranja, amarela ou branca restante é a linha de sinal, que recebe o sinal PWM do receptor e informa ao servo qual ângulo girar. Você só precisa conectar esses três fios aos pinos do receptor. O receptor geralmente é marcado com "+", "-" e "S" ().
Cada canal do receptor possui três pinos, geralmente dispostos em ordem: linha de sinal, positivo, negativo ou vice-versa. Você pode pensar no receptor como uma “estação de transferência de comando”. Os comandos de ação enviados pelo controle remoto são convertidos em sinais elétricos por meio dele e depois transmitidos ao aparelho de direção por meio do fio de sinal. Basta conectar o fio vermelho do servo no pino "+" do receptor, o fio preto no pino "-" e o fio de sinal no pino do canal correspondente, e todo o link de controle será conectado.
Você já segurou um servo e olhou atordoado para três fios? Os vermelhos e pretos são fáceis de identificar, mas não sei se o restante é um fio de sinal. Na verdade, a maioria dos servos deixa o fio de sinal laranja, amarelo ou branco. Por exemplo, marcas gostam de usar servos laranja, JR e Ai usam amarelo e muitos servos domésticos usam branco. Você se lembra de uma regra simples: exceto o vermelho e o preto, o restante é a linha de sinal.
Se você encontrar um servo com uma cor especial, como uma combinação de vermelho, marrom e laranja, então o marrom será o fio terra e o laranja será o fio de sinal. Existem também alguns fios de servo que são vermelhos, pretos e brancos, e o branco é o fio de sinal. A maneira mais segura é olhar a etiqueta na carcaça do servo, que geralmente contém os símbolos "S", "+" e "-" impressos. Se a etiqueta estiver desgastada, você poderá saber facilmente medindo-a com um multímetro. A ponta de teste vermelha está conectada ao pólo positivo mais provável, a ponta de teste preta está conectada ao terra e o restante é a linha de sinal.
A linha de números no receptor é o canal. Os canais 1 a 6 são independentes e cada canal pode controlar um servo. Em aeromodelos, o canal 1 geralmente controla os ailerons, o canal 2 controla o profundor, o canal 3 controla o acelerador e o canal 4 controla o leme. Mas se você estiver trabalhando em um projeto de robô ou gimbal, esses canais podem ser atribuídos à vontade. Se você quiser que o servo se mova com qual joystick, basta conectar a linha de sinal no canal correspondente.
Como você sabe qual canal corresponde a qual joystick? É muito simples. Após conectar os fios, tente mover o joystick. Se você inserir o servo no canal 1, mover o joystick direito para a esquerda e para a direita e o servo se mover, então o canal 1 será o canal do aileron. Se não houver resposta, mude de canal e tente novamente. Alguns controles remotos também podem reatribuir o mapeamento de canais por meio do menu de configurações, o que proporciona um alto grau de liberdade. Para projetos controlados por um microcontrolador, a seleção do canal passa a ser uma questão de definir qual pino emite o sinal PWM no programa, e a lógica é a mesma.
Depois de conectar os fios, se você mover o joystick, o servo não se moverá. Esta é a cena de rollover mais comum. Não entre em pânico, é provavelmente um dos três motivos. Verifique a fiação primeiro. Os fios vermelho e preto estão conectados ao contrário? Se for conectado ao contrário, o circuito interno do servo pode ter queimado. Em seguida, verifique se o receptor está ligado. Se for alimentado por um ESC, o ESC está conectado a uma bateria? A luz indicadora no receptor está sempre acesa para ser considerada funcionando corretamente. Por fim, confirme se o controle remoto e o receptor estão conectados à frequência. Se a luz estiver piscando, significa que eles não estão conectados.
Se o servo emitir um leve som de “chiado” ou vibrar, mas simplesmente não girar, provavelmente é porque a fonte de alimentação é insuficiente. A corrente na partida do servo é muito grande, especialmente no servo de alto torque. Se a tensão da bateria estiver baixa ou a corrente ESC for muito pequena, ela não poderá ser acionada. Você pode fornecer energia ao servo separadamente, conectar o fio vermelho do servo ao módulo estabilizador de tensão externo, o fio preto e o receptor são aterrados e o fio de sinal é conectado normalmente, resolvendo assim o problema de corrente insuficiente. Verifique também se o braço do servo está preso. A interferência mecânica impedirá que ele gire.
Se você quiser controlar vários servos ao mesmo tempo, como um hexápode ou um gimbal multieixo, será necessário conectá-los todos ao receptor. O método é muito simples. Cada servo ocupa um canal. O primeiro servo está conectado ao canal 1, o segundo servo está conectado ao canal 2 e assim por diante. Os fios de alimentação e terra de todos os servos podem ser combinados porque o barramento de alimentação do receptor está conectado. Conectar um canal equivale a fornecer energia a todos os canais.
Mas preste atenção especial às capacidades da fonte de alimentação. A fonte de alimentação embutida do receptor geralmente possui apenas 1 a 2 amperes de corrente. Se você conectar mais de três servos ou usar um servo de alto torque, o receptor pode facilmente ficar sobrecarregado ou até mesmo queimar. Neste momento, você precisa de um BEC externo (módulo de estabilização de tensão) para conectar os fios vermelho e preto de todos os servos à fonte de alimentação externa, e os fios de sinal ainda estão conectados ao receptor. O passo principal é conectar o fio terra da fonte de alimentação externa e o fio terra do receptor juntos, de modo a garantir que os sinais compartilhem o mesmo aterramento e o servo possa funcionar normalmente.
A coisa mais importante a ter cuidado é inverter os pólos positivo e negativo. Este é o erro mais comum entre os novatos e tem as consequências mais graves. Na pior das hipóteses, o servo não funcionará e, na pior das hipóteses, o servo e o receptor queimarão. Antes de fazer a fiação, é melhor usar um multímetro para confirmar qual pino do receptor é positivo e qual é terra. Se não houver etiqueta no receptor, você pode ler o manual ou ver se há outros dispositivos conectados por perto para comparar as posições dos pinos. Mais uma coisa, nunca conecte ou desconecte o servo enquanto a energia estiver ligada, pois a corrente de pico pode facilmente danificar o circuito.
Se você precisar estender o cabo servo, certifique-se de usar um cabo de extensão servo especial. Não pegue apenas dois fios e parafuse-os você mesmo. O cabo de extensão tem uma extremidade macho e uma extremidade fêmea. Depois de conectá-lo, é melhor fixá-lo com uma gravata ou tubo termorretrátil. Especialmente se for usado em um drone ou modelo de carro, a vibração fará com que o plugue se solte. Finalmente, é recomendado que você remova o braço do servo durante o teste e confirme se o servo gira normalmente antes de instalar o braço. Isso pode evitar travamentos mecânicos e danos ao servo. Afinal, um servo não é barato.
Que outros problemas estranhos você encontrou ao conectar o servo? Bem-vindo a compartilhar sua experiência na área de comentários, e podemos discutir e resolver juntos.
Hora de atualização: 21/03/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















