


























SUPORTE TÉCNICO


Publicado 2026-02-16
Recentemente, um amigo estava mexendo em uma pequena invenção e queria aplicar o método de controle remoto infravermelho aoservocontrole, mas descobriu que ou oservogirou aleatoriamente ou simplesmente não respondeu. Acredito que muitos amigos que estão apenas começando já se depararam com situações semelhantes. Eles querem implementar o controle sem fio, mas estão presos a vários detalhes técnicos. Na verdade, usandoum sensor infravermelho para controlar oservoé essencialmente fazer com que o servo entenda as “palavras” do controle remoto. Este assunto não é tão complicado quanto se imagina. Vamos esclarecer passo a passo.
Para fazer o servo obedecer obedientemente, o núcleo é estabelecer a relação correspondente entre o sinal infravermelho e o ângulo do servo. O código infravermelho emitido pelo controle remoto é único quando cada botão é pressionado. Nossa tarefa é deixar o microcontrolador capturar esse código e depois traduzi-lo em instruções que o servo possa entender. Este processo é como atribuir uma missão específica a cada botão do controle remoto, como pressionar “Volume +” para fazer o servo girar 30 graus.
Na operação real, podemos implementar este processo de tradução através de programação. Quando o receptor infravermelho detecta o sinal, o microcontrolador irá decodificá-lo imediatamente e consultar a tabela de programas que definimos antecipadamente. Assim que um código correspondente for encontrado, a onda PWM correspondente é imediatamente enviada ao servo para fazê-lo girar no ângulo especificado. É como equipar o servo com um par de ouvidos que podem entender comandos infravermelhos.
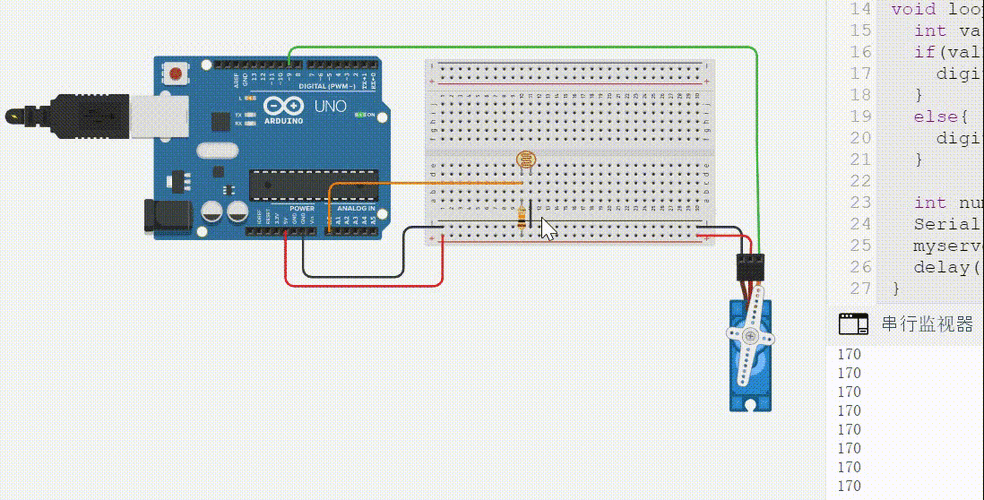
A conexão de hardware é a base de todo o sistema. Se você conectá-lo incorretamente, causará fumaça. Em primeiro lugar, é necessário distinguir os três pinos do receptor infravermelho. Normalmente, o VCC é conectado ao pólo positivo da fonte de alimentação, o GND é conectado ao terra e o pino OUT é conectado a um pino de interrupção do microcontrolador ou a uma porta de E/S comum. Este pino OUT é responsável por transmitir o sinal infravermelho recebido para o cérebro do microcontrolador.
A conexão do servo é relativamente fixa. Possui três fios, o marrom ou preto é o fio terra, o vermelho é o fio de alimentação e o laranja ou amarelo é o fio de sinal. Conecte a linha de sinal ao pino de saída PWM do microcontrolador. Observe que se a potência do servo for grande, é melhor fornecer energia separadamente. Não retire energia diretamente do microcontrolador, caso contrário a placa-mãe pode queimar facilmente. Conecte os fios terra públicos juntos para que o sinal possa ser transmitido normalmente.
Existem vários receptores infravermelhos e controles remotos no mercado, e escolher o errado tornará a depuração mais difícil. Para amigos novatos, é recomendado escolher diretamente um receptor infravermelho com frequência portadora de 38kHz. Por exemplo, este é atualmente o modelo mais versátil e adequado para a maioria dos controles remotos de eletrodomésticos. Quanto ao controle remoto, basta encontrar uma TV ociosa ou um controle remoto de decodificador em casa. Não há necessidade de comprar um novo.
Se quiser comprar seu próprio controle remoto, você pode escolher um pequeno controle remoto com protocolo NEC. A decodificação deste protocolo é relativamente simples e os códigos mais prontos podem ser encontrados online. Tente evitar escolher controles remotos com alguns protocolos impopulares, caso contrário o processo de decodificação lhe dará dor de cabeça. Lembre-se de que escolher o hardware certo é metade do sucesso do seu projeto.
O código é a alma da lógica de controle, mas não tenha medo, muitos códigos básicos podem ser encontrados online. Primeiro usamos funções de biblioteca para simplificar o processo, como usar a biblioteca para lidar com a recepção infravermelha e usar a biblioteca Servo para controlar o servo. Durante a inicialização, primeiro defina o pino de recepção de infravermelho e o pino do servo e defina o ângulo inicial do servo.
Na função de loop, deixamos o microcontrolador detectar continuamente se há entrada de sinal infravermelho. Assim que houver um sinal, leia seu valor e use a instrução ou if para fazer um julgamento. Se o valor for para uma chave específica, deixe o servo ir até 30 graus; se for outra chave, deixe ir até 90 graus. Após escrever o código, carregue-o no microcontrolador e teste-o com o controle remoto.
Quando você pressiona o controle remoto com grandes expectativas, apenas para descobrir que o servo está tremendo ou lento para responder, não duvide de sua vida com pressa. A causa mais comum de vibração do servo é a fonte de alimentação insuficiente. Especialmente quando o servo requer um grande torque para girar, a corrente instantânea reduzirá a tensão, fazendo com que o microcontrolador seja reiniciado. Tente alimentar o servo separadamente ou conecte um capacitor grande em paralelo às duas extremidades da fonte de alimentação para estabilizar a tensão.
Outra causa comum é a interferência do sinal infravermelho. Se houver luzes fortes ou outros dispositivos infravermelhos por perto, a recepção poderá ser afetada. Certifique-se de que o receptor infravermelho não esteja bloqueado e que o controle remoto esteja voltado para ele. Algum processamento de debouncing também pode ser adicionado ao código, como um ligeiro atraso antes da execução após a detecção do sinal, de modo a eliminar a possibilidade de falso disparo.
Depois de controlar um servo com um botão, você definitivamente vai querer tocar algo mais complexo. Por exemplo, use um controle remoto para controlar vários servos ou obtenha regulação de velocidade contínua. Na verdade, isso não é difícil. Podemos usar diferentes botões no controle remoto para controlar diferentes servos. Por exemplo, o botão 1 controla o servo A e o botão 2 controla o servo B. Eles não interferem entre si e cada um desempenha suas funções.
Se você deseja controlar o servo para girar continuamente, você pode definir duas teclas, uma para aumentar o ângulo e outra para diminuir o ângulo. Cada vez que uma tecla é pressionada, o ângulo muda em 5 ou 10 graus, permitindo um ajuste fino. Você pode até criar um programa que permita ao servo executar automaticamente um conjunto de procedimentos de ação predefinidos após receber uma sequência específica de teclas, tornando um dispositivo simples instantaneamente inteligente.
Vendo isso, você já está com coceira e quer experimentar agora mesmo? Na verdade, este método de jogo é particularmente adequado para uso na modificação de carros inteligentes, cabeças de câmera ou braços robóticos. Gostaria de perguntar a todos, em seu projeto criativo, que tipo de ação interessante vocês mais desejam usar o controle remoto infravermelho para controlar o servo e concluí-lo? Bem-vindo a deixar uma mensagem na área de comentários para compartilhar suas ideias maravilhosas. Se você achar este artigo útil para você, não se esqueça de curtir e compartilhar com mais amigos que precisam dele!
Hora de atualização: 16/02/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















