


























SUPORTE TÉCNICO


Publicado 2026-03-12
Tenho trabalhado no controle do volante há algum tempo e passei por mais armadilhas do que comi. A princípio pensei que ele iria girar quando o conectasse a um sinal PWM, mas o resultado foi que ele vibrava como o Parkinson ou não conseguia girar no ângulo que eu queria. Mais tarde, me acalmei e fiz várias rodadas de experimentos, e então encontrei algumas pistas. Hoje vou compartilhar com você alguns insights práticos para ajudá-lo a evitar desvios.
Quando você entra em contato pela primeira vez comservos, você definitivamente ficará confuso com esses termos. Não se preocupe, vamos desmontar e dar uma olhada. A caixa de direção é essencialmente um "pequeno sistema de circuito fechado" que integra um motor DC, engrenagem de redução e painel de controle. Você fornece um sinal de pulso e ele detecta o ângulo atual através do potenciômetro interno e o compara com a posição alvo memorizada. Se não estiver correto, ele irá girar até ficar alinhado.
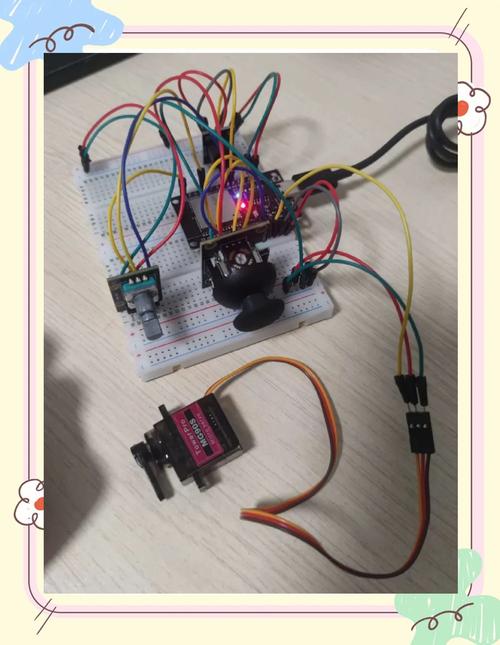
O que fiz naquela época foi muito estúpido, mas muito eficaz: peguei um 9g baratoservoe desmontou e olhou para ele. Vendo o potenciômetro girar com o eixo de saída com meus próprios olhos, entendi instantaneamente qual era o feedback. Então usei um osciloscópio para observar o sinal de controle e descobri que o tempo de alto nível era de 0,5 ms a 2,5 ms, correspondendo a 0 graus a 180 graus. A lógica ficou clara imediatamente.
O programa parece simples, basta enviar um PWM, mas não é fácil conseguir estabilidade. No início, usei atraso de software para simular o PWM. Como resultado, o servo girou um após o outro. Como o microcontrolador teve que realizar outro trabalho, o atraso foi interrompido. Mais tarde, ele foi substituído por uma interrupção de temporizador, e um temporizador de hardware foi especialmente reservado para gerar ondas PWM, e o servo imediatamente tornou-se suave.
Há outro detalhe que você pode ignorar: o status da porta GPIO no momento da inicialização. Se a saída do pino do microcontrolador for incerta quando ele for iniciado, o servo irá sacudir violentamente, o que pode causar pelo menos um choque ou, na pior das hipóteses, danificar a estrutura mecânica. Minha solução é: primeiro puxe todos os pinos relacionados ao servo para baixo ao ligar e, em seguida, traga-os lentamente para o ângulo alvo após a conclusão da inicialização. Este truque é particularmente eficaz.
Falando em jitter, há muitos truques aqui. O problema mais comum é a fonte de alimentação. A corrente quando o servo é iniciado pode subir para 1A ou até mais. Se a fonte de alimentação não aguentar e a tensão cair, o microcontrolador na placa de controle deverá ser reiniciado. Usei um banco de energia de celular para alimentar um único servo e era muito estável.
Outra coisa que passa facilmente despercebida é a interferência na linha de sinal. Especialmente quando o cabo servo é relativamente longo, o sinal PWM atua como uma antena e está sujeito a ruído de acoplamento. A solução também é simples: use um par trançado para a linha de sinal ou puxe-o diretamente para o terra com um resistor de 1k, que pode suprimir efetivamente o tremor. Além disso, se a frequência PWM estiver muito longe dos 50 Hz (período de 20 ms) exigidos pelo servo, isso também levará a um controle impreciso.
Existem todos os tipos de servos no mercado, e se você escolher o projeto errado, seu trabalho será em vão. Primeiro observe o torque, que está diretamente relacionado ao fato de ele poder acionar sua carga. Normalmente calculo o torque necessário para a carga e deixo uma margem de 30%. Por exemplo, se você quiser fazer um braço robótico, a articulação mais distal requer o menor torque, então a base deve ser várias vezes maior.
Em seguida, observe a velocidade, usando o indicador seg/60°. Por exemplo, 0,12seg/60° é mais rápido que 0,18. Mas esteja ciente de que o torque e a velocidade são muitas vezes contraditórios, e aqueles com maior torque geralmente são mais lentos. A última coisa é a tensão e o tamanho de trabalho. Você tem que ver se sua placa pode pagar e se as peças estruturais podem ser instaladas. A durabilidade das engrenagens de metal e o baixo custo das engrenagens de plástico dependem do seu orçamento e dos cenários de aplicação.
Se você quiser fazer um robô, deverá controlar vários servos ao mesmo tempo. Existem apenas uma dúzia de portas IO em um bloco. O controle direto é teoricamente possível, mas na prática não pode ser controlado e a corrente de partida é muito alta ao mesmo tempo. Minha abordagem é usar uma placa de controle servo, como esta placa de interface I2C, que pode gerenciar 16 canais. O controle principal apenas envia comandos, e todo o PWM é gerado por ele.
Você também deve prestar atenção ao software. Nunca deixe todos os servos saltarem de 0 graus para 180 graus ao mesmo tempo. A corrente pode interromper sua fonte de alimentação. Fiz um "início escalonado" no código, movendo apenas um passo do servo a cada 20ms, ou usando um método de início lento para deixá-los "subir" lentamente até a posição alvo, para que a corrente seja muito mais suave.
A pior lição que aprendi foi que a fonte de alimentação estava conectada ao contrário. Só quando houve fumaça é que percebi que os servos comuns não possuem proteção contra conexão reversa. Mais tarde, aprendi a colocar diodos no cabo de alimentação ou a trabalhar no plugue. O design infalível é muito importante. Também existe um limite mecânico. O ângulo deve ser limitado no programa, caso contrário o servo baterá na parede e a engrenagem logo entrará em colapso.
Além disso, ao depurar, não fique apenas olhando para o código, preste mais atenção à montagem mecânica. Uma vez, o servo tremia o tempo todo e, depois de lutar com o programa por três dias, finalmente descobri que o parafuso da biela estava solto e a folga era muito grande. Desde então, desenvolvi um hábito: primeiro verificar o maquinário, depois verificar o circuito e, por fim, mover o código. Essa sequência me economizou muito tempo.
Qual foi o problema mais estranho que você já encontrou com o controle servo? Vamos bater um papo na área de comentários e estudar juntos. Se achar útil, dê um like e compartilhe com mais amigos, para que todos possam trabalhar no projeto sem problemas!
Hora de atualização: 12/03/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















