


























SUPORTE TÉCNICO


Publicado 2026-02-26
Acredito que muitos amigos encontraram esse problema ao mexer em robôs ou dispositivos DIY: oservofoi comprado e conectado à energia, mas simplesmente não se moveu ou apenas girou estupidamente em uma direção. Você deseja que ele se mova de maneira flexível como um pescoço humano e acione uma câmera ou um pequeno apontador laser para atingir onde quiser, mas não sabe por onde começar. Não se preocupe, realmente fazendo oservogimbal obediente não é tão complicado quanto você pensa. Hoje vamos falar sobre como controlar a rotação desteservocardan.
Para ser franco, um gimbal de dois eixos pode se mover para cima, para baixo, para a esquerda e para a direita, contando com dois servos para desempenhar suas respectivas funções. Um tubo está na direção horizontal, que é o que costumamos chamar de rotação esquerda e direita, e o termo é "direção" ou "translação"; o outro tubo fica no sentido vertical, ou seja, quando você levanta e abaixa a cabeça, o termo é “pitch”. Você deve primeiro consertar os dois servos e construir a estrutura mecânica do gimbal para que eles possam ser responsáveis por uma direção sem interferir um no outro. Isto é como um pescoço humano. Ele precisa ser capaz de virar a cabeça para a esquerda e para a direita e acenar com a cabeça. Também depende de diferentes grupos musculares. Portanto, o primeiro passo para controlar a rotação é primeiro descobrir em qual direção você deseja que o gimbal se mova, o que corresponde a qual servo está funcionando.
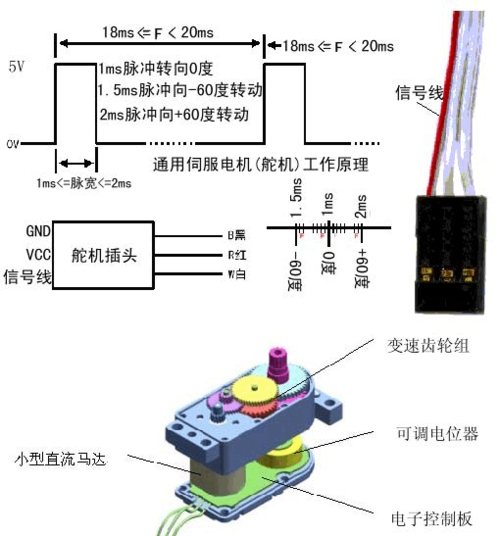
Muitos novatos ficam confusos ao ver as palavras “sinal de controle” e “PWM” e sentem que estão muito avançados. Na verdade, é muito simples. Você pode pensar nisso como enviar um “comando de tempo” ao servo. A posição do eixo da caixa de direção não é determinada pela tensão, mas por um pulso de alto nível que dura alguns milissegundos. Geralmente, esse pulso varia entre 1 milissegundo e 2 milissegundos. Envie um pulso de 1 milissegundo e o servo girará para a esquerda; envie um pulso de 1,5 milissegundos e ele girará para o meio; envie um pulso de 2 milissegundos e ele girará para a extrema direita. Para que o gimbal gire continuamente, depende da placa de controle principal (como STM32) enviar continuamente esse pulso 50 vezes por segundo, e a largura do pulso muda ligeiramente a cada vez.
Como o princípio é enviar pulsos, é muito intuitivo implementá-lo em código. Nessa plataforma, você pode usar diretamente a "biblioteca de servidor" pronta, sem precisar calcular o tempo sozinho. Por exemplo, se você escrever.escrever(90), ele gerará automaticamente um pulso que pode girar o servo para a posição de 90 graus. Você deseja que o gimbal faça movimentos circulares lentamente da esquerda para a direita? Escreva um loop for para aumentar lentamente o ângulo de 0 a 180, com um pequeno atraso no meio, e o gimbal girará suavemente. Para aqueles que são novos em aplicações de caixas de direção, esta é definitivamente a maneira mais rápida de começar. Você não precisa entender como a camada inferior gera pulsos, você só precisa dizer ao servo "para qual ângulo ir".
Se você quiser se sentir mais intuitivo sobre “acertar onde aponta”, seria uma experiência muito interessante usar um potenciômetro (aquela espécie de botão giratório) para controlar diretamente o gimbal. Você pode conectar o potenciômetro ao pino de entrada analógica do microcontrolador. O programa irá ler continuamente a posição atual do botão (como um valor de 0 a 1023) e então "mapear" esse valor proporcionalmente ao valor do ângulo exigido pelo servo (como 0 a 180). Quando você gira lentamente o potenciômetro com a mão, o servo do gimbal girará de forma síncrona, como se estivesse conectado por uma biela invisível. Essa sensação de feedback de controle em tempo real lhe dará uma compreensão mais profunda do “controle”.
É claro que apenas o controle manual não é suficiente. Se quiser que o gimbal se mantenha nivelado ou rastreie automaticamente um alvo, você precisa usar um sensor de atitude, por exemplo. Você pode instalar o sensor no cardan e ele detectará se o cardan está inclinado em tempo real. Assim que houver uma força externa para torná-lo torto, o programa irá ler imediatamente os dados de desvio, calculá-los rapidamente através do algoritmo PID e, em seguida, enviar imediatamente uma instrução de correção de ângulo para o leme. Todo o processo é concluído em milissegundos, dando a sensação de que não importa o quanto você balance a base, a câmera no gimbal permanecerá sempre imóvel, estável como uma montanha. Esta tecnologia de estabilização automática de imagem é amplamente utilizada em fotografia aérea e estabilizadores portáteis.
Devo lembrá-los de uma armadilha em que é particularmente fácil cair: o problema do fornecimento de energia. Quando o servo é iniciado e carregado, a corrente instantânea será muito grande. Se você usar uma fonte de alimentação USB de microcontrolador comum para acioná-lo, a tensão será reduzida instantaneamente, fazendo com que o microcontrolador seja reiniciado ou o servo se contraia ou balance diretamente. Portanto, não economize na fonte de alimentação. É melhor preparar uma bateria externa ou módulo de estabilização de tensão para o servo com capacidade de saída de corrente suficiente e conectar os fios terra de alimentação do microcontrolador e do servo juntos. Somente desta forma todo o sistema poderá funcionar de forma estável e todos os seus códigos e lógica de controle anteriores poderão ser usados.
Depois de ver isso, você tem uma ideia melhor de como controlar a rotação do servo e do gimbal? Desde o simples envio de pulsos até o uso de código para obter controle de ângulo e a adição de estabilização automática do sensor, cada etapa pode aproximar você do seu produto criativo. Quer experimentar agora mesmo e instalar um pescoço flexível em sua câmera ou gadget? Se você encontrar algum problema ao selecionar um servo ou projetar uma estrutura, você também pode ir a alguns fóruns profissionais de robôs ou sites oficiais de empresas, onde existem soluções prontas e produtos maduros para referência. Depois de falar tanto, de repente fiquei curioso, para quais projetos interessantes você deseja usar este servo gimbal? Compartilhe na área de comentários, dê um like e deixe que mais amigos práticos vejam suas ideias!
Hora de atualização: 26/02/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















