


























SUPORTE TÉCNICO


Publicado 2026-03-02
Depois de trabalhar nisso por muito tempo, por que oservoparar de se mover? Não se preocupe, nove em cada dez vezes algo deu errado nesses lugares.
A coisa mais louca sobre controlarservos com ESP32 está escrevendo o código e conectando os fios com grande expectativa, apenas para descobrir que um dos váriosservos sempre "apaga" assim que a energia é ligada. Não se precipite em duvidar da vida. Muito provavelmente, este não é um problema metafísico, mas uma armadilha comum que cometemos na fiação, na fonte de alimentação ou na configuração do código. Hoje vamos falar sobre como descobrir passo a passo ao encontrar “uma das caixas de direção não está se movendo”.
Muitas vezes o servo não se move porque está quebrado, mas porque está com “fome”. Pequenos servos comuns, como o SG90, podem parecer imperceptíveis, mas quando estiverem carregados ou precisarem responder rapidamente, a demanda instantânea de corrente aumentará. A capacidade de saída integrada de 3,3 V do ESP32 é muito fraca e não consegue alimentar um servo em movimento. Se você conectar o cabo de alimentação do servo diretamente no pino de 3,3V do ESP32, é normal que ele não consiga se mover ou se mova com dificuldade. Pense bem: como um adulto pode ter forças para trabalhar se não tem o que comer? O mesmo princípio se aplica ao aparelho de direção.
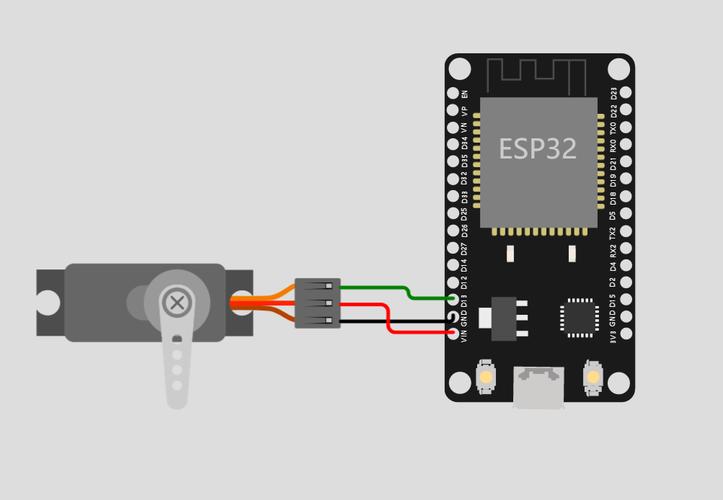
Portanto, uma “cantina” separada deve ser preparada para o servo. De modo geral, é recomendado o uso de uma fonte de alimentação externa para alimentar o servo, como uma bateria de lítio 18650 ou um módulo buck de saída ajustável. Lembre-se de conectar firmemente o GND do ESP32 e o GND da fonte de alimentação do servo para que os sinais tenham um ponto de referência comum. Verifique sua fiação. Está "ligando" o servo que não se move? Ou deixá-lo se espremer junto com todo mundo para pegar comida?
Embora o ESP32 seja poderoso, suas funções de pinos são um tanto complicadas. Nem todos os pinos GPIO marcados com números podem emitir sinais PWM diretamente para controlar o servo. Alguns pinos têm um “nível alto” padrão na inicialização ou são usados para outras funções especiais. Se você acidentalmente conectar a linha de sinal do servo a esses pinos "especiais", após a execução do programa, ele poderá não ser inicializado ou poderá se comportar de maneira estranha.
Sugiro que você desenvolva um bom hábito e dê prioridade ao uso da placa de desenvolvimento ESP32 com pinos claramente marcados que podem ser usados para PWM. Geralmente você pode consultar os diagramas de função dos pinos de vários ESP32s. Evite usar GPIO 6-11, que geralmente está conectado ao Flash integrado. Você pode tentar alterar a linha de sinal do servo imóvel para um pino PWM que você tem certeza que funcionará bem, como GPIO 13, 14 e 15. Faça algumas alterações simultaneamente no código e veja se ele "ganha vida".
ESP32 controla o servo. O núcleo é gerar sinais PWM através da biblioteca de hardware LEDC. No código, precisamos primeiro configurar um canal PWM, depois vincular esse canal a um pino GPIO específico e, finalmente, definir a frequência e a resolução PWM para gerar o pulso de período de 20 ms exigido pelo servo. Se no seu código vários servos compartilharem o mesmo canal PWM, eles interferirão entre si, o que pode mostrar que apenas um servo pode se mover ou pode agir de forma anormal.
Dê uma olhada rápida em seu código de inicialização. Cada servo recebe um número de canal independente? Por exemplo, se (0, 50, 16) usa o canal 0, então o próximo servo deve usar (1, 50, 16). O número do canal e o pin são duas coisas diferentes. Deve-se garantir que cada instância do servo possua um canal exclusivo. Este é um pequeno detalhe que é fácil de ignorar, mas é muito importante.
Após a solução de problemas nesta etapa, se a fonte de alimentação, os pinos e o código parecem estar OK, então devemos nos perguntar se há um problema "físico" com o próprio servo. Afinal, a direção é uma combinação de mecânica e eletrônica. Ele pode estar quebrado ao sair da fábrica ou pode ser queimado por voltagem inadequada ou fiação errada durante problemas anteriores. Uma maneira simples de avaliar é conectar o “servo com problema” a um canal que esteja funcionando corretamente e testá-lo.
Por exemplo, você conecta o fio de sinal do servo que não está se movendo ao pino de sinal do servo que está funcionando bem próximo a ele (observe que é o mesmo programa de controle, apenas troque o fio e conecte-o). Se ele se mover, significa que não há nada de errado com o servo em si e que o problema ainda está na fiação ou configuração anterior. Se ele permanecer imóvel ou apenas emitir um “zumbido”, mas não girar, pode-se basicamente concluir que esse irmão do volante provavelmente está prestes a “se aposentar com honra”. Não fique relutante, apenas mude quando chegar a hora de mudar.
Você pode ter fornecido energia ao servo separadamente, mas a fonte de energia é poderosa o suficiente? Imagine que vários servos precisam girar ao mesmo tempo, e a demanda instantânea de corrente será muito grande. Se você estiver usando uma bateria seca comum ou um carregador de celular antigo com capacidade de saída de apenas 500 mA, a tensão será reduzida instantaneamente. Quando a tensão está baixa, o ESP32 pode reiniciar e o servocontrolador também pode atacar devido à tensão insuficiente. O servo que estiver mais distante da fonte de alimentação ou que tiver uma resistência interna um pouco maior pode ser o primeiro a “cair”.
Você pode tentar conectar a alimentação ao servo imóvel separadamente e ver se ele se move. Ou mude para uma fonte de alimentação mais potente, como uma fonte de alimentação regulada com saída superior a 2A ou uma bateria de lítio com resistência interna menor. Ao mesmo tempo, tente usar fios mais grossos para alimentar a direção. Os fios delgados têm alta resistência, o que também causará muita perda de tensão durante a transmissão, e será "sobrecarregado" ao atingir a direção.
Ok, já conversamos muito, da fonte de alimentação aos pinos, do código ao próprio servo, essas armadilhas são basicamente as culpadas de "um servo não se mover". Se você passar por isso do começo ao fim, deverá ser capaz de resolver a maioria dos problemas. Pensando no seu processo de construção, qual aspecto você acha que é mais facilmente esquecido? É um problema com a fonte de alimentação ou com a configuração do canal no código? Bem-vindo a compartilhar sua experiência na área de comentários, e não se esqueça de curtir e salvar. Da próxima vez que você encontrar o mesmo problema, poderá verificá-lo diretamente!
Hora de atualização: 02/03/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















