


























SUPORTE TÉCNICO


Publicado 2026-03-30
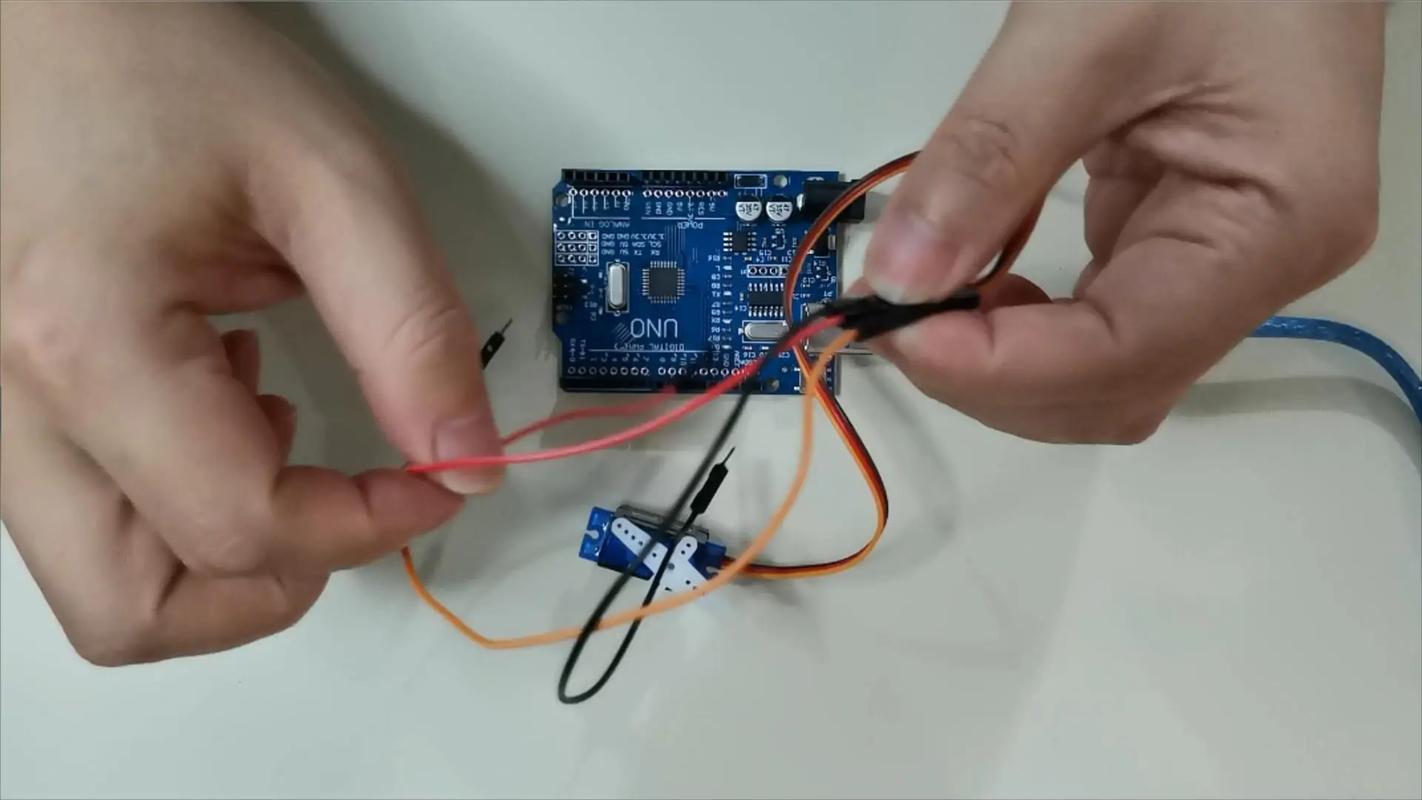
Obtenha umservoe você verá três fios saindo de trás dele. As cores costumam ser bem uniformes: vermelho é o polo positivo da fonte de alimentação, ligado em 5V; marrom ou preto é o fio terra, que é o pólo negativo; laranja ou amarelo é o fio de sinal, usado para transmitir pulsos de controle. Não faça o contrário. O vermelho está conectado ao positivo, o preto está conectado ao negativo e o laranja está conectado ao sinal. Lembre-se desta fórmula e você não entrará em pânico. Alguns baratosservos podem ter cores diferentes. Por exemplo, o branco é usado como linha de sinal. Em seguida, leia o manual ou use um multímetro para testá-lo. Mas a maioria padrãoservoVamos seguir esta regra de cores, então fique à vontade para usá-la.
Se você ainda tem medo de fazer uma conexão errada, verifique a etiqueta na caixa do servo. Muitos deles terão três símbolos “+”, “-” e “S” impressos neles. S é a linha de sinal. Não importa se você não consegue encontrar o rótulo, basta lembrar das combinações mais comuns: vermelho no meio, marrom e laranja nos dois lados. Pegue uma placa de ensaio e alguns fios DuPont, conecte primeiro os fios de alimentação e terra e, por último, conecte o fio de sinal. Desta forma, mesmo que a conexão seja invertida, o servo não queimará imediatamente, pois não girará aleatoriamente sem sinal. Seja corajoso e cuidadoso, e você se familiarizará com ele depois de tentar algumas vezes.
Muitos novatos conectam diretamente os fios vermelho e preto do servo aos 5V e GND do microcontrolador e então descobrem que o microcontrolador reinicia ou o servo treme violentamente. Isso ocorre porque a corrente quando o servo é iniciado é muito grande e a capacidade de saída de 5 V em placas de microcontroladores comuns é limitada, geralmente apenas algumas centenas de miliamperes. A corrente de trabalho de um servo de 9 gramas pode atingir 200-300mA, e mais de dois matarão diretamente o microcontrolador. Portanto, a abordagem correta é: fornecer a fonte de alimentação ao servo separadamente, não através do microcontrolador.
Você precisa de uma fonte de alimentação externa de 5 V, como uma caixa de bateria mais duas baterias de lítio 18650 (reduzidas para 5 V) ou um cabeçote de carregamento de 5 V/2 A. Conecte o pólo positivo da fonte de alimentação ao fio vermelho do servo e o pólo negativo ao fio preto do servo. Ao mesmo tempo, conecte o pólo negativo da fonte de alimentação ao GND do microcontrolador. Este é um “terreno comum”. A linha de sinal ainda está conectada apenas à porta IO do microcontrolador. Desta forma, o servo recebe energia da fonte de alimentação externa, e o microcontrolador é responsável apenas pelo envio dos sinais. Os dois não interferem um no outro e a operação é estável.
A linha de sinal deve ser conectada ao pino do microcontrolador que suporta saída PWM. PWM é modulação por largura de pulso, o que significa simplesmente que pode gerar ondas quadradas de diferentes larguras e níveis altos. O servo depende desta largura de pulso para decidir para qual ângulo girar. Os pinos PWM de diferentes microcontroladores são diferentes: 3, 5, 6, 9, 10, 11 no Uno; quase todos os pinos do ESP32/ESP32 podem simular PWM; 51 microcontrolador precisa usar seu próprio temporizador. Verifique o esquema da sua placa e não faça conexões aleatórias.
Ao conectar, observe: primeiro escreva o programa de forma que o pino emita um sinal PWM de 50 Hz (período de 20 ms). O tempo de alto nível de 0,5 ms corresponde a 0 graus, 1,5 ms corresponde a 90 graus e 2,5 ms corresponde a 180 graus. Muitos novatos conectam a linha de sinal à porta IO digital comum e descobrem que o servo não se move ou balança aleatoriamente. É porque não há sinal PWM. Se você não tiver certeza de qual pino pode ser usado, abra o IDE e selecione "Example→Servo→Sweep". O pino padrão nº 9 é usado, então você definitivamente não errará se segui-lo.
O conceito de terra comum pode parecer misterioso para muitas pessoas quando o ouvem pela primeira vez. Na verdade é muito simples: quer você utilize uma fonte de alimentação externa para alimentar o servo ou o 5V que acompanha o microcontrolador, os pólos negativos (GND) de todos os dispositivos devem estar conectados entre si por fios. Se não estiver conectado, a tensão do sinal enviado pelo microcontrolador flutuará em relação ao terra do servo, e o servo não será capaz de entender quantos graus você deseja que ele gire. É como se duas pessoas conversassem, uma usa centímetros e a outra polegadas, mas os números não coincidem. Um terreno comum é um padrão de referência unificado.
Ao fazer a fiação, você pode usar uma placa de ensaio para conectar o GND do microcontrolador, o pólo negativo da fonte de alimentação externa e o fio preto do servo na mesma linha de orifícios. Ou use um fio DuPont para conectar diretamente o GND do microcontrolador ao pólo negativo da fonte de alimentação. Preste atenção ao pedido: conecte primeiro o fio terra comum e, em seguida, conecte o fio de sinal e o pólo positivo da fonte de alimentação. Desenvolver esse hábito pode evitar muitos problemas estranhos. Existem muitos casos de servos balançando, não girando ou girando aleatoriamente. No final, depois de verificar várias vezes, simplesmente esquecemos de compartilhar o terreno. Este tópico economiza três horas de solução de bugs.
Depois de conectar os fios e gravar o programa, o servo não respondeu nada. Não se preocupe, verifique na ordem: primeiro passo, verifique a tensão da fonte de alimentação. Use um multímetro para medir se há cerca de 5 V entre a linha vermelha e a linha preta do servo. Se for inferior a 4,5 V, o servo pode não iniciar. O segundo passo é verificar se o fio terra comum está solto. Conecte e desconecte o fio comum novamente. Muitas vezes é um mau contato na protoboard. A terceira etapa é confirmar se o pino selecionado realmente emite o sinal PWM. Dê uma olhada com um osciloscópio ou analisador lógico, caso contrário, tente trocar os pinos.
Se o servo clicar, mas não girar, a carga pode estar muito pesada. Levante suavemente o braço do servo com as mãos para ver se está preso. Também é possível que a faixa de largura de pulso esteja errada. Por exemplo, seu programa envia de 0,5ms a 2,5ms, mas o servo na verdade requer de 0,7ms a 2,3ms. Isto pode ser resolvido modificando os valores mínimo e máximo de pulso no código. A última situação: o próprio servo está quebrado. Tente mudar o servo. Se o novo puder virar, o antigo está queimado. Normalmente o servo queima porque a tensão excede 6V ou o fio de sinal está conectado inversamente.
Controlar o servo é mais fácil por causa da biblioteca Servo pronta. Abra o IDE e clique em "Projeto→Carregar Biblioteca→Servo". Escreva quatro linhas de código:# apresenta a biblioteca,Servo;cria o objeto,.(9);liga o pino 9,.escrever(90);gira o servo em 90 graus. Coloque-os na função de configuração e o servo girará imediatamente para a posição intermediária após o upload. Se você quiser balançar para frente e para trás, escreva.escrever(0); atraso(1000); .escrever(180); atraso(1000);no circuito.
Nota: A biblioteca Servo ocupará o temporizador. Se você usar outras funções que exijam tempo preciso ao mesmo tempo, poderá haver conflitos. Neste momento, você pode mudar para controle direto PWM, usandoNão funciona porque sua frequência está errada. Uma maneira melhor é usar.()e forneça o valor do microssegundo diretamente. Por exemplo, 1.500 microssegundos correspondem a 90 graus. Além disso, não envie novos comandos com frequência quando o servo estiver girando. Deixe mais de 200 milissegundos para que ele chegue. Depois de dominar essas poucas linhas de código, você já poderá controlar a maioria dos servos padrão.
Você já se deparou com uma situação em que o servo vibra descontroladamente ou emite um som sibilante após ser conectado? Compartilhe sua experiência de fiação na área de comentários. Aquele com mais curtidas ajudará você a solucionar o problema remotamente.
Hora de atualização: 30/03/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















