


























SUPORTE TÉCNICO


Publicado 2026-04-21
Se você está se perguntando se umservomotor requer uma placa de driver separada, a resposta direta é:nem sempre, mas em muitas situações práticas, sim.Um hobby padrãoservocontém um circuito de controle integrado e um pequeno motor DC, que permite que ele seja acionado diretamente pelo pino PWM (modulação por largura de pulso) de um microcontrolador. No entanto, quando você precisa controlar váriosservoPara alimentar um servo de grande porte ou obter movimentos suaves e sem oscilações, uma placa de driver dedicada torna-se essencial. Este artigo explica exatamente por que os servos podem funcionar sem um driver extra, quando você deve adicionar um e como decidir com base no seu projeto real.
Dentro de cada servo posicional padrão (do tipo usado em braços robóticos, carros RC e animatrônicos), existem três componentes principais:
Um motor CC
Um conjunto de engrenagens de redução
Uma pequena placa de controlecom um potenciômetro para feedback de posição
Esta placa de controle interno recebe um sinal PWM (geralmente 50 Hz, com larguras de pulso entre 1 ms e 2 ms) e aciona diretamente o motor DC para girar o eixo de saída no ângulo comandado. Como a eletrônica de controle já está dentro do servo,nenhuma placa de driver externa é necessária para operação básica– você pode conectar o fio de sinal do servo diretamente a um pino do microcontrolador e seus fios de alimentação a uma fonte de alimentação externa apropriada (normalmente 4,8V-6,0V).
Exemplo da vida real:Um iniciante que constrói uma garra de robô simples geralmente conecta um pequeno servo diretamente a uma placa microcontroladora. O microcontrolador gera o sinal PWM e o servo se move corretamente sem nenhum driver extra. Isso funciona perfeitamente para um ou dois servos pequenos.
Mesmo que um único servo possa ser controlado diretamente, muitos projetos falham ou funcionam mal sem uma placa driver. Aqui estão os três casos mais frequentes em que uma placa de driver é necessária.
Os microcontroladores têm um número limitado de pinos PWM (por exemplo, uma placa típica de baixo custo pode ter apenas 6 saídas PWM de hardware). Mais importante ainda, a geração de sinais PWM precisos para vários servos usando software bit-banging consome muito tempo da CPU, causando instabilidade, perda de pulsos e movimentos erráticos.
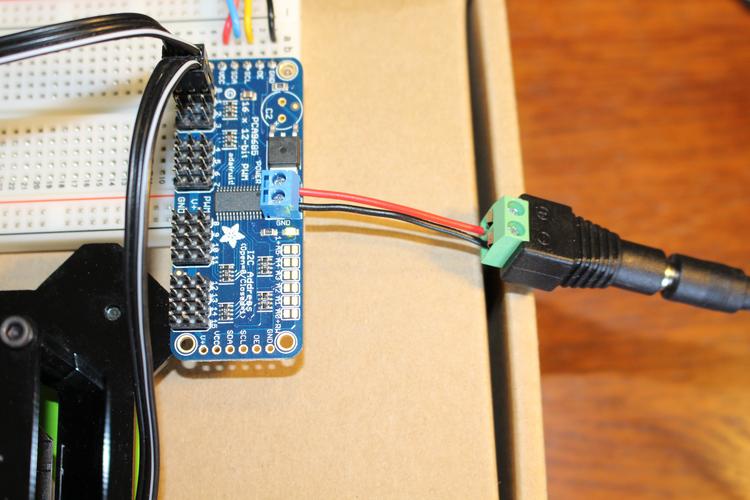
Uma placa servo driver (como um driver PWM de 16 canais) descarrega a geração PWM do microcontrolador. Ele usa uma interface I²C – apenas dois pinos no microcontrolador – para controlar até 16 servos simultaneamente, com temporização estável e sem oscilações.
Exemplo da vida real:Um entusiasta que construiu um robô ambulante de seis pernas (12 servos) tentou conectar todos os servos diretamente ao microcontrolador. As pernas se contraíram aleatoriamente e o microcontrolador superaqueceu. Depois de adicionar uma placa servo driver de 16 canais, cada perna se moveu suavemente e o microcontrolador só precisou enviar comandos de posição simples via I²C.
Um único servo pequeno pode consumir 200-500mA quando em movimento e até 1A quando parado. A maioria das placas microcontroladoras não pode fornecer mais de 500mA no total de seu pino de 5V. Quando você conecta até mesmo dois servos diretamente à saída de 5V da placa, a tensão cai, o microcontrolador é reiniciado ou os servos se comportam de maneira imprevisível.
Uma placa de driver resolve isso:
Extraindo energia diretamente de umfonte separada de alta corrente(por exemplo, 5V/5A)
Fornecendo traços de energia e capacitores dedicados para cada canal servo
Isolando a potência do servo da delicada lógica do microcontrolador
Exemplo da vida real:Um fabricante construiu um suporte de câmera pan-tilt com dois servos de tamanho médio. Quando ambos os servos se moviam ao mesmo tempo, o microcontrolador era reinicializado aleatoriamente. O problema desapareceu instantaneamente após usar uma placa de driver alimentada por um adaptador de parede de 5V/3A – o microcontrolador agora fornecia apenas os sinais lógicos de baixa corrente.
Servos posicionais padrão esperam um sinal PWM de 50 Hz.Servos de rotação contínua(frequentemente usados como rodas) também funcionam com PWM, mas exigem atualização constante do sinal, mesmo na posição neutra. Sem um driver dedicado, erros de temporização de software causam desvios indesejados.
Servos de grande escala (por exemplo, para robôs industriais ou modelos RC para serviços pesados) geralmente operam a 7,4 V ou 12 V. O nível lógico de 5 V de um microcontrolador não pode acionar diretamente sua entrada de controle de maneira confiável, e os pinos de alimentação do microcontrolador não conseguem lidar com a corrente. Uma placa driver com mudança de nível e regulação de energia externa torna-se obrigatória.
Você pode pular com segurança a placa do driver setodosdestas condições são verdadeiras:
Você está controlandoapenas um ou dois pequenos servos padrão(por exemplo, tamanho 9g a 20g)
O pino 5V do seu microcontrolador pode fornecer pelo menos 1A (verifique as especificações da sua placa)
Os servos se movem com pouca frequência e nunca sob alta carga mecânica
Você pode usar PWM baseado em software em pinos não dedicados (embora o tempo possa ser menos preciso)
Exemplo da vida real:Um rastreador solar simples que move um pequeno servo uma vez a cada 10 minutos funciona perfeitamente sem uma placa driver. O microcontrolador dorme a maior parte do tempo e o servo consome corrente de pico por apenas 0,5 segundos.
Muitos iniciantes confundem servomotores com motores de passo ou motores CC comuns. UMmotor DC desencapadoou ummotor de passorequer absolutamente um driver externo (ponte H ou driver de passo) porque eles não possuem componentes eletrônicos de controle integrados. Os servo motores são únicos – eles integram o driver dentro da carcaça. É por isso que você pode conectar um servo “diretamente”, enquanto não pode fazer o mesmo com um stepper.
Para obter o melhor desempenho sem desperdiçar dinheiro com hardware desnecessário, use este processo de decisão simples:
1. Conte seus servos– Se ≥3 servos → compre uma placa de driver (por exemplo, driver PWM de 16 canais).
2. Verifique sua fonte de alimentação– Se a corrente total de bloqueio de todos os servos exceder a classificação do pino de 5 V do seu microcontrolador → use uma placa de driver com alimentação externa.
3. Teste de instabilidade– Escreva um programa de varredura simples. Se algum servo se contorcer ou vibrar em repouso → adicione uma placa de driver.
4. Para todos os outros casos– Comece sem uma placa de driver, mas mantenha uma placa de driver como backup de baixo custo (US$ 5 a US$ 10).
Conclusão central final repetida:Um servo motor nãosempreprecisa de uma placa de driver porque possui um circuito de controle interno. No entanto, para projetos multiservo confiáveis, aplicações de alta corrente ou desempenho sem oscilações, uma placa de driver dedicada não é apenas útil – é essencial.
Etapa de ação:Antes de comprar qualquer peça, calcule a corrente total de bloqueio dos seus servos (encontre o valor na folha de dados) e compare-a com a corrente máxima de saída do seu microcontrolador. Se o número for maior ou você planeja usar mais de dois servos, solicite uma placa de driver junto com seus servos – isso economizará horas de depuração e evitará danos aos componentes.
Hora de atualização: 21/04/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















