


























APOYO TÉCNICO


Publicado 2026-02-25
Al jugar con elservo, ¿Alguna vez te has encontrado con esta vergüenza: aunque el programa esté escrito, elservo¿Sigue temblando o el movimiento está atascado como un PPT? De hecho, esto probablemente se deba a que el momento no es el correcto. Especialmente cuando se utiliza un USB de 6 canalesservoPara un controlador como Micro, comprender su ritmo de "pulso" es más importante que el servo que elija. Hoy vamos a hablar sobre cómo hacer que esto sea fluido y hacer que su proyecto avance sin problemas.
La velocidad de rotación del mecanismo de dirección es, para decirlo sin rodeos, la tasa de cambio del ancho del pulso de la señal de control. Micro nos permite ajustar el tiempo que tarda cada canal en pasar del ángulo actual al ángulo objetivo mediante scripts o instrucciones. Por ejemplo, si desea que el brazo robótico se levante con gracia en 2 segundos en lugar de expulsarse en 0,1 segundos, debe configurar el parámetro "velocidad" o "tiempo" en el comando. Su interior te ayudará a calcular cuántos pulsos de transición se deben enviar en el medio para lograr un movimiento suave. En el uso real, primero puede probarlo manualmente para encontrar la duración adecuada del ejercicio y luego escribirlo en el código.
Si el servo tiembla, no culpes a la calidad del servo. Muchas veces, la fluctuación se produce porque la frecuencia de actualización de la señal de control no coincide con el circuito interno del servo o porque la fuente de alimentación es insuficiente. Aunque Micro tiene potentes capacidades de estabilización de voltaje y procesamiento de señales, si la ondulación de su fuente de alimentación es demasiado grande, o si maneja múltiples servos de alto torque al mismo tiempo y el voltaje se reduce, el chip de control dentro de los servos "atraerá viento", que aparecerá como una vibración de un lado a otro. Además, si la línea de señal se acerca a fuentes de interferencia fuertes, como motores, se pueden introducir ruidos fácilmente. Primero verifique la fuente de alimentación y use un multímetro para medir el voltaje dinámico. Muchas veces el problema se soluciona.
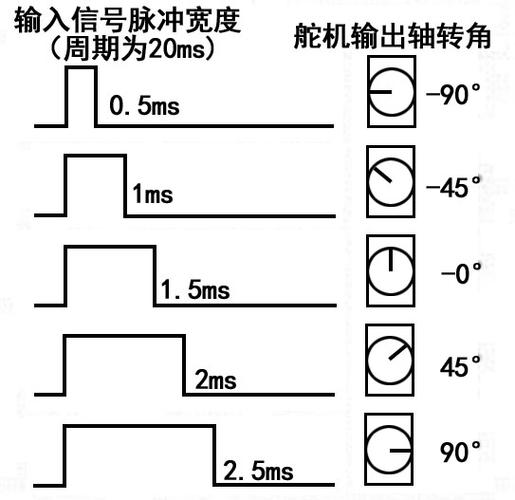
De forma predeterminada, el rango de pulso del servo de Micro generalmente se establece entre 1000 µs y 2000 µs, lo que corresponde a 0 a 180 grados. Sin embargo, en funcionamiento real, muchos servos domésticos pueden tener un rango de carrera más amplio, como de 500 µs a 2500 µs, e incluso pueden girar a más de 200 grados.
Si descubre que el servo no puede girar al ángulo especificado o se atasca a mitad de la rotación, entonces es necesario calibrar el ancho de pulso mínimo y máximo de cada canal en el software. Esta operación no es complicada. Solo necesita seleccionar el canal, deslizar el control deslizante manualmente, observar cuidadosamente el límite de rotación real del servo y luego completar el valor correspondiente. De esta manera se puede proteger eficazmente el mecanismo de dirección contra daños y aprovechar al máximo su potencial.
Cuando se utiliza un puerto USB a serie para el control, el error más común es la discrepancia en la velocidad de baudios. En el software, la velocidad en baudios predeterminada es 9600. Sin embargo, si lo escribe en el código, la comunicación definitivamente no será posible. Además, también está la cuestión del formato de las instrucciones. El protocolo compacto utilizado tiene requisitos extremadamente estrictos para la verificación de datos. Incluso si es solo un error de transmisión de bytes, se ignorará directamente. Se recomienda utilizar primero el software de prueba oficial para enviar comandos simples. Si el dispositivo puede funcionar normalmente, verifique cuidadosamente el código que escribió usted mismo. Además, no olvide el retraso que se produce al cambiar entre transceptores y transceptores durante la comunicación semidúplex. Aunque esta situación se maneja muy rápidamente, agregar unos pocos milisegundos de retraso hará que la comunicación sea más estable cuando las instrucciones se envían continuamente a alta frecuencia.
Al mismo tiempo, hay otros aspectos a los que es necesario prestar atención. Al conectar un dispositivo USB a serie, asegúrese de que la interfaz sea estable y no esté suelta; de lo contrario, la estabilidad de la transmisión de datos podría verse afectada. Además, diferentes sistemas operativos pueden tener diferente compatibilidad, por lo que durante el proceso de depuración, se debe considerar completamente la versión del sistema operativo. Si encuentra una comunicación inestable, además de verificar la velocidad en baudios, el formato del comando, el retraso y otros problemas comunes, también puede intentar cambiar la interfaz USB o reiniciar la computadora para eliminar algunos factores potenciales de interferencia y garantizar un control estable y preciso en diversos entornos.
Si quieres conseguir acciones coordinadas de 6 servos al mismo tiempo, en lugar de actuar uno a uno, la clave es utilizar la función "script". Puede escribir un script con cuidado aquí, establecer cuidadosamente la posición objetivo y el tiempo de movimiento de cada canal y luego dejar que el controlador ejecute el script de forma independiente, sin depender más de la computadora para enviar comandos en tiempo real. De esta manera, incluso si la computadora se congela, el brazo robótico aún puede completar sin problemas una serie de acciones combinadas.
Si el control en tiempo real se realiza a través de la computadora host, es necesario habilitar el "comando simultáneo multicanal" para empaquetar y enviar los ángulos objetivo de todos los canales a la vez para evitar la desincronización causada por retrasos en la red.
Si el servo está atascado, es probable que tengas hambre. Cada servo puede consumir varios amperios de corriente cuando está bloqueado. Si 6 de ellos trabajan juntos, la corriente instantánea puede superar fácilmente los 20A. Si solo usa una fuente de alimentación USB, no solo no podrá transportarla, sino que también puede quemar la placa base de la computadora. El enfoque correcto es proporcionar una fuente de alimentación independiente, conectar el cable de alimentación del servo directamente a una batería o fuente de alimentación conmutada con suficiente potencia y permitir que la señal solo se reciba a través de USB. Tenga en cuenta que el cable a tierra de la fuente de alimentación y el cable a tierra de la computadora deben estar conectados a la misma tierra; de lo contrario, la señal flotará aleatoriamente. Con la fuente de alimentación instalada, la mayoría de los tartamudeos y fluctuaciones se pueden solucionar.
Al ver esto, ¿te das cuenta de que el control del mecanismo de dirección no es tan misterioso? De hecho, muchos problemas residen en los detalles. ¿Cuál es el problema más difícil del mecanismo de dirección que haya encontrado mientras trabajaba en un proyecto? Bienvenido a compartir su "historia de sangre y lágrimas" en el área de comentarios y evitemos trampas juntos. Si encuentra útil este artículo, no olvide darle me gusta y reenviarlo para que más amigos que juegan servos puedan verlo.
Hora de actualización: 2026-02-25
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















