


























SUPPORTO TECNICO


Pubblicato 2026-02-16
Ho appena ricevuto ilservoe volevo collegarlo al microcontrollore, ma ero confuso guardando i tre fili? Non preoccuparti, questo è un problema che tocca quasi ogni principiante che giocaservoincontreranno. In effetti, il cablaggio è più semplice di quanto pensi. Finché capisci a cosa servono i tre fili e segui i passaggi passo dopo passo, puoi essere sicuro di ottenere ilservomuoversi entro mezz'ora.
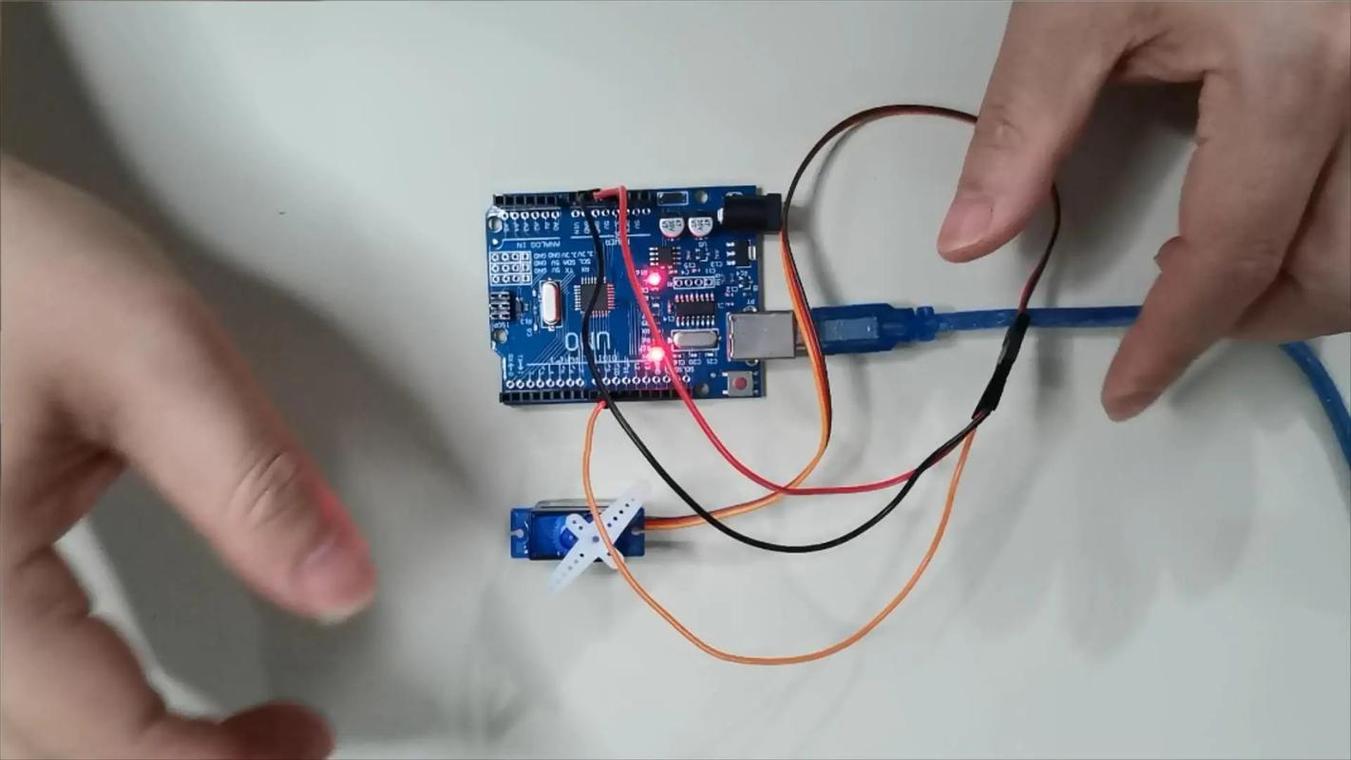
I tre fili che si estendono dal servo sono solitamente il cavo di alimentazione, il cavo di terra e il cavo del segnale. Il cavo di alimentazione è solitamente rosso ed è collegato al pin 5V del microcontrollore per alimentare il servo. Il filo di terra è marrone o nero ed è collegato al pin GND del microcontrollore per consentire al circuito di formare un anello. La linea del segnale è solitamente arancione o gialla, collegata al pin di uscita PWM del microcontrollore e viene utilizzata per controllare l'angolo di rotazione del servo. Comprendere le funzioni corrispondenti ai colori è un primo passo valido.
Se hai effettuato il collegamento in base al colore, ma il servo non si muove, il motivo più comune è l'alimentazione insufficiente. La corrente sui pin da 5 V del microcontrollore stesso è limitata e non può pilotare il grande mangiatore del servo. In questo caso, il servo potrebbe vibrare leggermente ma non girare, o potrebbe non rispondere affatto. Prova a collegare un alimentatore esterno separato al servo, come un pacco batteria o un modulo di stabilizzazione della tensione, e collega il filo di terra dell'alimentatore al filo di terra del microcontrollore. La linea del segnale rimane invariata e il problema solitamente può essere risolto.
La scelta dell'alimentatore dipende dal tipo di servo che stai utilizzando. Se si tratta di un normale servo a piccola coppia, la corrente di lavoro è di diverse centinaia di milliampere e può essere pilotato modificandolo con alcune batterie a secco o con il power bank di un telefono cellulare. Se si tratta di un servo in metallo ad alta coppia, la corrente operativa può raggiungere diversi ampere, quindi è necessario considerare l'utilizzo di una batteria speciale per aeromodelli o di un modulo di stabilizzazione della tensione ad alta potenza. La chiave è guardare la tensione di lavoro nominale e la corrente a rotore bloccato del servo. Secondo questo parametro aggiungere un margine del 20% per renderlo pratico da usare.
Una volta terminato il cablaggio, è il momento di scrivere il codice. È necessario inviare un'onda PWM al pin in cui si trova la linea del segnale del microcontrollore, che è il segnale di controllo necessario per simulare il servo. Generalmente la scatola dello sterzo richiede una frequenza di 50Hz, che significa un ciclo di 20 millisecondi. In questo ciclo, il tempo di alto livello è compreso tra 0,5 millisecondi e 2,5 millisecondi, corrispondenti a 0 gradi fino a 180 gradi del servo. Nelle funzioni di libreria di molti microcontrollori sono disponibili librerie Servo già pronte. Puoi chiamare direttamente l'angolo di scrittura senza dover calcolare tu stesso questi tempi complicati.
Se vuoi che il robot si muova, un servo non è assolutamente sufficiente. Quando si collegano più servi, l'alimentazione diventa un grosso problema. In questo momento, non pensare di utilizzare l'alimentazione del microcontrollore. È necessario utilizzare un alimentatore esterno e l'alimentatore deve essere sufficientemente grande. Collegare insieme i fili rossi di tutti i servi al polo positivo dell'alimentatore e i fili neri insieme per collegare il polo negativo dell'alimentatore e la terra comune del microcontrollore. Le linee di segnale sono rispettivamente collegate a diversi pin PWM del microcontrollore. In questo modo, ogni servo può essere controllato indipendentemente nel programma e lasciarli lavorare insieme.
A volte viene scritto l'angolo, ma la posizione del servo è sempre deviata. Ciò potrebbe essere dovuto a un'interferenza nella linea del segnale, soprattutto quando il cablaggio è relativamente lungo. Prova a torcere insieme il cavo del segnale e il cavo di terra dell'alimentazione, il che può svolgere un certo effetto anti-interferenza. Inoltre, anche il potenziometro all'interno del servo presenta errori fisici. È possibile regolare leggermente l'intervallo della larghezza dell'impulso nel codice e perfezionarlo per rendere l'angolo più preciso. Se non è preciso dopo un uso prolungato, è possibile che il servo stesso sia usurato e debba essere sostituito.
La masterizzazione di qualcosa è solitamente causata da troppa corrente o da un cablaggio errato. Assicurarsi di ricontrollare la tensione di alimentazione prima del cablaggio. Non collegare mai l'alimentatore ad alta tensione direttamente al servo. Il polo negativo dell'alimentatore esterno che alimenta il servo deve essere collegato al GND del microcontrollore, in modo che si possa formare un livello di riferimento unificato. Durante il debug del programma, è possibile posizionare il servo ad un angolo medio prima di accenderlo per evitare che il servo giri improvvisamente verso il basso e causi una corrente eccessiva al momento dell'accensione. Se senti che il servo è caldo o emette rumori anomali, scollega immediatamente l'alimentazione e controlla.
Spero che questi contenuti possano aiutarti a compiere con successo il primo passo verso il servocomando dello sterzo. Pensaci, qual è il problema specifico che ti disturba di più quando effettui il cablaggio o la programmazione? Benvenuto per parlare della tua esperienza nell'area commenti. Se lo trovi utile, non dimenticare di mettergli un mi piace e condividerlo con più amici che ne hanno bisogno.
Tempo di aggiornamento: 2026-02-16
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















