


























SUPPORTO TECNICO


Pubblicato 2026-02-23
Non capisco ilservomodulo di guida? Non preoccuparti, capirai dopo aver letto questo articolo
Molti amici che sono nuovi all'innovazione del prodotto rimangono sempre bloccati nello stesso posto durante l'utilizzoservos: Perché ilservoNon si muovono quando sono collegati direttamente alla rete elettrica? E' rotto? In realtà il problema non è il servo, ma manca un "intermediario" fondamentale: il modulo del servoazionamento. In poche parole, il modulo del servoazionamento è il ponte che collega il cervello di controllo principale (come un microcontrollore) e il servo stesso. È responsabile dell'interpretazione del segnale di controllo e della fornitura di potenza sufficiente per ruotare con precisione il servo nell'angolo desiderato. Senza di esso, ci sarebbe un muro tra i tuoi pensieri e l'azione del servo, senza alcuna comunicazione possibile.
Potresti pensare, il motore non inizierà a girare quando viene accesa l'alimentazione? Lo sterzo è essenzialmente un motore, ma integra un riduttore e un circuito di feedback, rendendolo un preciso sistema a circuito chiuso. Collegalo direttamente a un alimentatore stabile da 5 V e si "accenderà", ma si sposterà stupidamente in una posizione fissa o rimarrà immobile perché non ha ricevuto istruzioni. Ciò di cui ha bisogno è un segnale di impulso periodico, che è ciò che spesso chiamiamo onda PWM, per dirgli "di quanti gradi dovrebbe girare adesso". Sebbene il chip di controllo principale possa generare questo segnale, la corrente di uscita è troppo piccola. È come usare un sottile tubo dell’acqua per azionare una grande ruota idraulica e non riuscire a spingerla affatto. In questo momento, per fornire energia è necessaria la grande pompa dell'acqua del modulo di azionamento.
Ha due funzioni principali: isolamento e amplificazione del segnale e fornitura di alimentazione stabile. Innanzitutto, riceve il debole segnale PWM dal chip di controllo principale, lo modella e lo migliora per garantire che il segnale non venga distorto durante la trasmissione e possa essere riconosciuto con precisione dal servo. In secondo luogo, e cosa ancora più importante, fornisce un'interfaccia di potenza potente e indipendente per il servo. La corrente del servo sarà molto elevata quando viene avviato o bloccato. Se l'alimentazione viene prelevata direttamente dalla scheda di controllo principale, è facile bruciare il chip di controllo principale o causare un calo improvviso della tensione del sistema o un arresto anomalo del sistema. Il modulo di azionamento è come un alimentatore affidabile, che fornisce energia in modo fluido dall'alimentatore esterno al servo, proteggendo al contempo il cervello di controllo principale dalle interferenze.
Sul mercato sono disponibili tutti i tipi di moduli driver. Cosa dovresti fare se sei sopraffatto? Ricorda solo questi punti.️Per prima cosa, guarda il numero di canali. Quanti servi vengono utilizzati nel tuo progetto dipende dal numero di canali. Ad esempio, potrebbero essere necessari 6 canali per controllare un semplice braccio robotico. Non comprare di meno.️In secondo luogo, guarda la tensione e la corrente. Questa è la cosa più importante! Assicurati di controllare se l'intervallo di tensione supportato dal modulo corrisponde alla tensione di funzionamento del tuo servo (solitamente 5 V o 6 V) e presta maggiore attenzione alla corrente massima che il modulo può emettere continuamente. Se il tuo servo è un servo in metallo a coppia elevata, devi scegliere un modulo in grado di emettere una corrente di 10 A o superiore. Non lasciarti limitare da piccoli moduli. ️Terzo, guarda l'interfaccia di comunicazione. La più comune è l'interfaccia I2C, che può controllare dozzine di servi con soli due fili, che risparmia le risorse pin del controllo principale ed è particolarmente amichevole per i principianti.
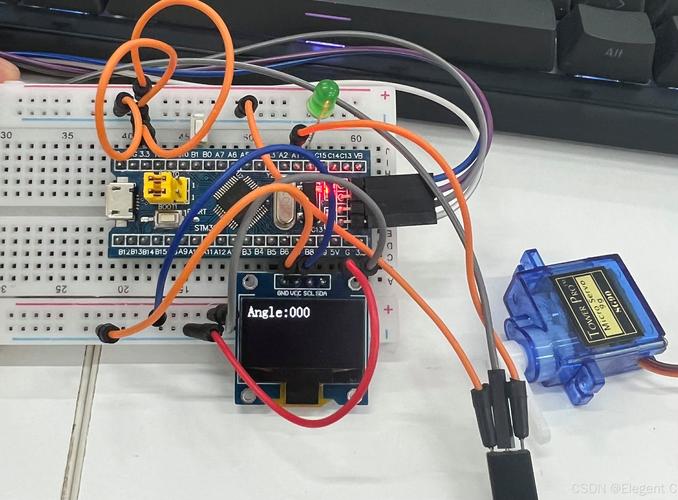
In realtà è più facile di quanto pensi, proprio come i mattoni da costruzione. Il primo passo è fornire alimentazione al modulo: collegare i poli positivo e negativo dell'alimentatore esterno (come un pacco batteria) al terminale di ingresso dell'alimentazione del modulo. Fare attenzione a non invertire i poli positivo e negativo, altrimenti potrebbe verificarsi del fumo. Il secondo passo è collegare il servo: collega il filo del segnale del servo (solitamente un filo giallo o bianco) alla porta di uscita del segnale del modulo. Il filo rosso è collegato al polo positivo e il filo marrone o nero è collegato al polo negativo, corrispondenti uno a uno. Il terzo passaggio consiste nel collegare il controllo principale: utilizzare il cavo Dupont per collegare l'interfaccia I2C (SDA e SCL) del modulo al proprio o STM32, quindi collegarlo alla terra comune (GND a GND). La connessione hardware è completa e non resta che scrivere alcune righe di codice per richiamare il file di libreria per generare segnali di controllo.
Il vantaggio più intuitivo è che la stabilità del tuo progetto aumenterà. In passato, il microcontrollore poteva riavviarsi non appena il servo si muoveva. Dopo aver aggiunto il modulo driver, l'alimentatore è stabilmente isolato e alimentato e questo fastidioso problema non si verificherà mai più. Inoltre, la forma d'onda PWM emessa da un modulo driver di alta qualità è più pulita e precisa e la rotazione del servo sarà più fluida e avrà meno jitter, il che è fondamentale per robot o gimbal che richiedono un controllo preciso dell'angolo. Non dovrai più preoccuparti di problemi di fondo come la distribuzione dell'alimentazione e le interferenze del segnale. Puoi concentrare tutte le tue energie sull'innovazione delle funzioni del prodotto e sull'implementazione degli algoritmi, raddoppiando l'efficienza dello sviluppo.
Come qualcuno che è stato lì, lascia che ti dia un avvertimento. 1.Alimentazione insufficiente: Molte persone utilizzano il caricabatterie del cellulare per alimentare un servo di grandi dimensioni. Di conseguenza, la tensione viene interrotta quando viene tirato un oggetto pesante e il modulo lampeggia in rosso o addirittura si spegne. Assicurati di calcolare il consumo energetico totale e scegli un alimentatore o una batteria con potenza sufficiente. 2.Cablaggio allentato: Il servo vibra molto quando ruota. Se i terminali del cablaggio non sono collegati saldamente o le viti non sono serrate correttamente, è facile che si scolleghino improvvisamente durante il movimento, con conseguente perdita di controllo. Si raccomanda che tutti i collegamenti siano sicuri e fissati con colla, se necessario. 3.Ignorare la dissipazione del calore: Quando si lavora continuamente con corrente elevata, il chip sul modulo driver sarà molto caldo. Se il modulo non dispone di un dissipatore di calore, prendere in considerazione l'installazione di un dissipatore di calore o la dissipazione attiva del calore, altrimenti la protezione dal surriscaldamento non funzionerà.
Vedendo questo, hai già una comprensione più chiara del modulo del servoazionamento? Infatti, se scegli quello giusto e lo usi bene, il tuo viaggio verso la realizzazione creativa avrà più della metà del successo. Non so quali azioni interessanti intendi utilizzare il servo per realizzare nel progetto su cui stai lavorando? Benvenuto per condividerlo nell'area commenti, comunichiamo e discutiamo insieme. Se trovi utile questo articolo, non dimenticare di mettere mi piace e condividerlo con più amici che ne hanno bisogno!
Tempo di aggiornamento: 23-02-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















