


























SUPPORTO TECNICO


Pubblicato 2026-03-23
Hai mai riscontrato questa situazione: hai acquistato un microservo servoe volevo scrivere un programma per controllarlo. Tuttavia, dopo aver cercato a lungo online, il codice non ha funzionato o non è stato possibile installare la libreria? Non preoccuparti, oggi parleremo di come utilizzare 3 per conquistare questo piccoletto e renderlo obbediente nei tuoi progetti creativi.
La sua sintassi concisa e il ricco ecosistema di librerie lo rendono una scelta eccellente per lo sviluppo rapido di prototipi. Controllando i microservi, non è necessario preoccuparsi dei dettagli dei registri sottostanti come il linguaggio C. Puoi far ruotare il servo con poche righe di codice. Si tratta semplicemente di una cannuccia salvavita per una rapida verifica nella fase di innovazione del prodotto. Inoltre, può essere facilmente combinato con funzioni avanzate come il riconoscimento visivo e l’analisi dei dati, rendendo lo sterzo non più solo un semplice attuatore, ma una parte del sistema intelligente.
Le soluzioni principali sul mercato sono RPi.GPIO e .
Se utilizzi un Raspberry Pi, RPi.GPIO è la scelta più semplice. Può azionare direttamente i pin GPIO per generare segnali PWM. Tuttavia, va notato che questo pacchetto presenta alcune limitazioni nel supportare la precisione PWM, che possono facilmente far vibrare il servo.
In confronto, il pacchetto Servo appare più professionale. Utilizza PWM hardware o PWM software per controllare con precisione l'ampiezza dell'impulso, in modo che il servo ruoti in modo fluido e fluido. Si consiglia di utilizzare questo pacchetto perché il suo incapsulamento è più completo, supporta il controllo simultaneo di più servi e il codice è più elegante da scrivere.
Il primo passo è assicurarsi che il tuo 3 sia stato installato correttamente. Quindi digitare esattamente:pip3 --servonel terminale. L'esecuzione di questo comando installerà completamente tutte le librerie e le dipendenze richieste.
1. Se utilizzi un Raspberry Pi, devi abilitare anche la funzione I2C o PWM hardware. È possibile aprire l'interfaccia corrispondente in raspi-. 2. Quando si effettuano i collegamenti hardware, prestare particolare attenzione ai tre fili del servo: il filo marrone deve essere collegato a GND, il filo rosso deve essere collegato all'alimentazione a 5 V e il filo arancione deve essere collegato al pin di controllo GPIO. Assicurarsi di non collegarlo al contrario, altrimenti il servo potrebbe bruciarsi. Si consiglia di utilizzare un alimentatore esterno da 5 V come alimentazione. Non prendere l'alimentazione direttamente dai pin del Raspberry Pi, perché la corrente non sarà sufficiente.
Il seguente codice ha la funzione di far oscillare il servo avanti e indietro nell'intervallo compreso tra 0 gradi e 180 gradi. Innanzitutto, usaasseEpwmioper inizializzare il canale PWM per creare un ambiente di base per il funzionamento del servo. Successivamente, crea un fileservooggetto per facilitare il controllo preciso del servo. Tra questi, il punto chiave è la dichiarazione di assegnazione comeangolo.servo = 0Attraverso questa affermazione è possibile impostare in modo flessibile l'angolo al quale il servo vuole ruotare. Cioè, di quanti gradi vuoi che ruoti il servo, puoi assegnargli il grado corrispondente. Se vuoi che il servo si muova più lentamente in modo da poter osservare la sua rotazione più chiaramente, puoi aggiungere atempo.di.sonnodichiarazione per raggiungere questo scopo.
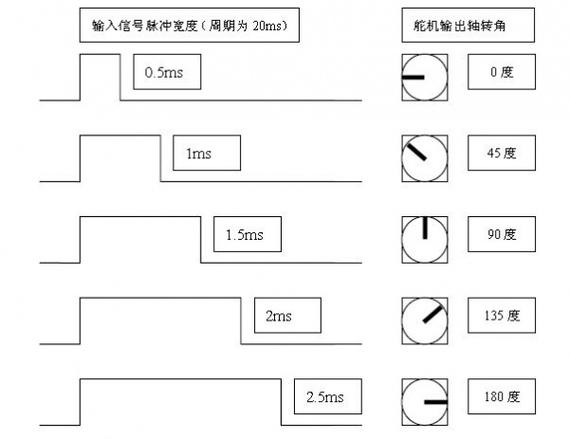
Se il servo fa un rumore anomalo, di solito c'è un problema con la frequenza degli impulsi. Il periodo PWM standard del microservo è di 20 ms. Quando il tempo di alto livello è compreso tra 0,5 ms e 2,5 ms, l'angolo corrispondente è compreso tra 0 e 180 gradi. La libreria utilizza per impostazione predefinita questa impostazione di parametro, quindi non è necessario che l'utente calcoli da solo i valori rilevanti.
Quando il progetto richiede che più servocomandi lavorino insieme, come la realizzazione di un braccio robotico o di un robot multi-articolazione, l'utilizzo della libreria è particolarmente conveniente. Devi solo crearne multipliservooggetti, ciascuno legato a un pin GPIO diverso, quindi impostarne gli angoli individualmente. C'è un piccolo trucco: quando si usapwmio., MettereImpostato su 50, che è la frequenza standard del servo. Se si tratta di questo tipo di scheda di espansione PWM, il codice è quasi lo stesso. Devi solo cambiare l'indirizzo I2C per controllare 16 servi contemporaneamente, il che è molto adatto per progetti complessi.
Molti amici hanno riferito che il servo improvvisamente ha smesso di muoversi o che l'angolo non era corretto. Il motivo più comune è un problema di alimentazione. La corrente istantanea di un microservo può raggiungere più di 1A. Se vengono attivati più servi contemporaneamente, una caduta di tensione istantanea provocherà il riavvio del Raspberry Pi. La soluzione è utilizzare un alimentatore regolato separato per alimentare il servo e il filo di terra deve essere collegato alla terra del Raspberry Pi. Un'altra trappola è l'intervallo dell'angolo. Il limite meccanico di alcuni modelli è solo 0-120 gradi. Se lo costringi a dare un comando di 180 gradi, il cambio si bloccherà ed emetterà un "clic". A questo punto, spegnere immediatamente e controllare i parametri specifici del modello di servo.
Controllando il micro-servo, trasformi rapidamente la tua creatività in un'opera mobile. Dal debug del singolo servo al collegamento multicanale, può aiutarti a risparmiare molto tempo di debug. Ora che hai letto questo, potresti anche chiederti: nel tuo prossimo prodotto innovativo, che tipo di effetti di azione possono questi piccoli servi aiutare il tuo progetto a ottenere risultati a cui non avresti mai osato pensare prima?
Tempo di aggiornamento: 23-03-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















