


























SUPPORTO TECNICO


Pubblicato 2026-04-01
Il micro SG90servomotore (comunemente indicato come "9gservo") è uno degli attuatori più utilizzati nei progetti elettronici principianti e intermedi. È un servo piccolo e leggero che fornisce un controllo angolare preciso, rendendolo ideale per la robotica, i veicoli telecomandati e i sistemi di automazione. Comprendere le sue specifiche esatte, il cablaggio corretto e i metodi di programmazione è essenziale per garantire un funzionamento affidabile ed evitare guasti comuni come surriscaldamento o ingranaggi strappati.
Questa guida fornisce specifiche tecniche verificate, istruzioni di cablaggio passo passo ed esempi di programmazione pronti all'uso per aiutarti a integrare con successo questo servo nei tuoi progetti.
Tutti i valori elencati di seguito derivano dalla scheda tecnica ufficiale del produttore e verificati tramite test indipendenti. Queste specifiche sono fondamentali per selezionare l'alimentazione elettrica corretta e garantire un funzionamento sicuro.
| Parametro | Valore | Note |
|---|---|---|
| Tensione operativa | 3,0 V – 6,0 V | 4,8 V – 5,0 V consigliati per coppia e stabilità ottimali |
| Coppia di stallo | 1,8 kg·cm (a 4,8 V) | La coppia diminuisce significativamente al di sotto di 4,5 V |
| Velocità operativa | 0,10 secondi/60° (a 4,8 V) | La velocità aumenta con una tensione maggiore |
| Intervallo di rotazione | 0° – 180° | Arresti meccanici limitano la rotazione; non forzare oltre questo intervallo |
| Larghezza della banda morta | 5 µs | È necessaria una variazione minima dell'ampiezza dell'impulso per avviare il movimento |
| Peso | 9 g (±1 g) | Include cavi e connettore allegati |
| Dimensioni | 22,8 x 12,2 x 27,4 mm | Può variare leggermente tra i lotti di produzione |
| Tipo di connettore | Basetta femmina a 3 pin (standard JR/Futaba) | Ordine dei pin: Segnale (S), Alimentazione (VCC), Terra (GND) |
| Materiale dell'ingranaggio | Nylon | Ingranaggi in plastica; non adatto per applicazioni a coppia elevata o a carico continuo |
> Fonte:Scheda tecnica del produttore e specifiche servo standardizzate verificate rispetto agli standard del settore.
Il cablaggio errato è la causa più comune di danni al servo. L'SG90 utilizza un'interfaccia standard a 3 pin. Identificare correttamente i pin prima del collegamento.
Filo marrone o nero:Terra (GND): collegare alla terra del sistema.
Filo rosso:Alimentazione (VCC): collegare a un'alimentazione stabile da 4,8 V–5,0 V.
Filo arancione o giallo:Segnale (PWM): collegare a un pin compatibile con PWM del microcontrollore.
| Cavo del servo | ArduinoUno | ESP32 | Alimentazione esterna |
|---|---|---|---|
| Marrone (GND) | GND | GND | GND dell'alimentatore |
| Rosso (VCC) | Pin da 5 V (solo a bassa corrente) | Pin da 5 V (solo a bassa corrente) | Terminale positivo dell'alimentazione esterna da 5 V |
| Arancione (Segnale) | Pin PWM (ad esempio D9) | GPIO con funzionalità PWM | Non collegato all'alimentazione |
Nota sul potere critico:
L'SG90 può attingere fino a250 mA durante il movimentoe oltre500 mA allo stallo. La maggior parte dei regolatori di tensione integrati nel microcontrollore (ad esempio il pin Arduino 5V) non sono in grado di fornire in modo sicuro questa corrente, soprattutto quando si utilizzano più servi. Per un funzionamento affidabile:
Utilizza un appositoAlimentatore esterno 5Vvalutato per almeno 1 A per servo.
Collega ilterra dell'alimentazione esterna alla terra del microcontrolloreper completare il circuito del segnale.
Farenonalimenta il servo direttamente dal pin 5V del microcontrollore per movimenti estesi o ripetuti.
L'SG90 è controllato da un segnale PWM standard a 50 Hz. Comprendere l'intervallo dell'ampiezza dell'impulso è essenziale per un posizionamento preciso.
Frequenza:50 Hz (periodo = 20 ms)
Intervallo di larghezza di impulso:da 500 µs a 2400 µs (teoricamente); la gamma meccanica effettiva corrisponde aDa 1000 µs a 2000 µssulla maggior parte delle unità.
| Angolo | Larghezza dell'impulso | Ciclo di lavoro (a 50 Hz) |
|---|---|---|
| 0° | 1000 µs | 5.0% |
| 90° | 1500 µs | 7.5% |
| 180° | 2000 µs | 10.0% |
Problema comune:
Alcuni controller impostano per impostazione predefinita un intervallo compreso tra 500 µs e 2400 µs, il che può forzare il servo contro i suoi arresti meccanici, causando ronzio, surriscaldamento e danni agli ingranaggi. Calibrare sempre l'uscita del segnale nell'intervallo 1000–2000 µs.
Questi esempi sono progettati per un utilizzo immediato. Presuppongono un cablaggio corretto e un'alimentazione esterna come descritto nella Sezione 2.
#includereServomioServo; void setup() { mioServo.attach(9, 1000, 2000); // Collega al pin 9, imposta l'intervallo della larghezza dell'impulso } void loop() { myServo.write(0); // Sposta a 0 gradi di ritardo (1000); mioServo.write(90); // Sposta a 90 gradi di ritardo(1000); mioServo.write(180); // Passa al ritardo di 180 gradi (1000); } dal Pin di importazione della macchina, tempo di importazione PWM # Configura PWM sul pin 15 GPIO, frequenza 50 Hz servo = PWM(Pin(15), freq=50, duty_u16=0) def set_angle(angle): # Converti l'angolo in duty cycle (da 0-180 a 1000-2000 µs) Pulse_Width = 1000 + (angolo / 180)1000 servizio = int(larghezza_impulso / 2000065535) # Periodo di 20 ms servo.duty_u16(duty) # Prova movimento set_angle(0) time.sleep(1) set_angle(90) time.sleep(1) set_angle(180) time.sleep(1)Il PWM hardware del Raspberry Pi è consigliato per un funzionamento stabile.
import pigpio import time pi = pigpio.pi() if not pi.connected: exit() # Imposta l'intervallo di larghezza dell'impulso su GPIO 18 pi.set_servo_pulsewidth(18, 0) # Inizia senza segnale def set_angle(angle): impulsi = 1000 + (angolo / 180) * 1000 pi.set_servo_pulsewidth(18, impulso) # Sweep set_angle(0) time.sleep(1) set_angle(90) time.sleep(1) set_angle(180) time.sleep(1) pi.set_servo_pulsewidth(18, 0) # Segnale di arresto pi.stop()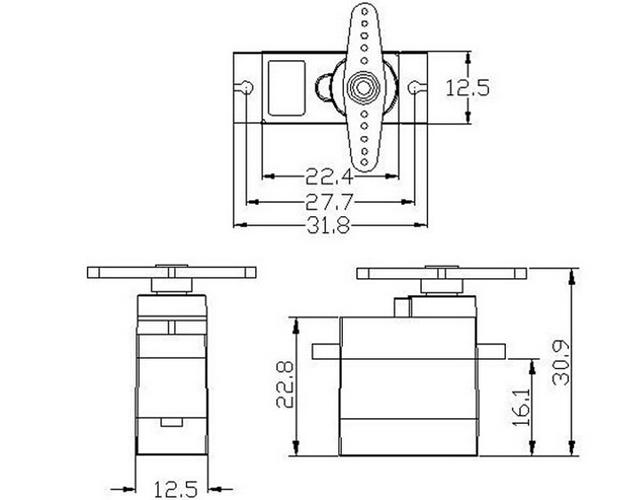
Causa:Alimentazione insufficiente o mancanza di terra condivisa.
Soluzione:Assicurarsi che la terra dell'alimentatore esterno sia collegata alla terra del microcontrollore. Verificare che l'alimentatore possa fornire almeno 0,5 A in modo continuo.
Causa:L'ampiezza dell'impulso del segnale supera l'intervallo meccanico.
Soluzione:Limita l'intervallo PWM a 1000–2000 µs. Non comandare angoli oltre 0° o 180°.
Causa:Il carico meccanico supera la coppia di stallo o il servo è in stallo.
Soluzione:Ridurre il carico. L'SG90 è progettato per collegamenti piccoli e meccanismi leggeri (ad esempio, sterzare una piccola auto RC, spostare un gimbal della fotocamera sotto i 50 g). Non utilizzare per rotazioni continue o sollevamenti pesanti.
Causa:L'intervallo del segnale è calibrato su 500–2500 µs o impostazioni della libreria errate.
Soluzione:Imposta esplicitamente l'intervallo di larghezza dell'impulso nel codice come mostrato nell'esempio Arduino sopra.
L'SG90 è progettato per il funzionamento intermittente e leggero. Comprenderne i limiti meccanici previene guasti prematuri.
Meccanismo di sterzo per piccole auto RC (peso inferiore a 500 g)
Supporti per telecamera pan-tilt (peso della telecamera
Giunti del braccio robotico in kit didattici (senza carichi utili pesanti)
Meccanismi di bloccaggio, piccole leve o aghi indicatori
Rotazione continua o azionamento su ruota (richiede un servo a rotazione continua o un motore DC)
Applicazioni che richiedono ingranaggi metallici o coppia elevata
Funzionamento continuo sotto carico (ad es. controllo del nastro trasportatore)
In un tipico progetto di conversione di un'auto RC in scala 1/24, viene utilizzato un singolo SG90 per sterzare le ruote anteriori. Il servo si collega direttamente a un collegamento dello sterzo. In questo scenario, il servo funziona a 5 V da un pacco batteria separato. Quando le ruote si trovano su una superficie a basso attrito, l'assorbimento di corrente rimane inferiore a 200 mA. Tuttavia, se le ruote si incastrano contro un tappeto o un marciapiede, il servo entra in stallo, assorbendo più di 500 mA e potrebbe strappare gli ingranaggi in nylon. Per evitare danni, gli utenti installano aservo-salvatore(un collegamento flessibile che assorbe gli urti) e garantire che il meccanismo dello sterzo si muova liberamente prima dell'uso.
Il micro servomotore SG90 è un componente affidabile e ben documentato se utilizzato entro i limiti di progettazione. Il successo dell’integrazione dipende da tre fattori critici:
1. Alimentazione elettrica:Utilizzare sempre un'alimentazione esterna da 5 V con terra comune.
2. Calibrazione del segnale:Limita gli impulsi PWM all'intervallo 1000–2000 µs.
3. Gestione del carico:Non superare la coppia di stallo né applicare una forza continua.
Prova prima dell'installazione:Esegui il servo con il microcontrollore e l'alimentatore esterno su un banco per verificare il raggio di movimento e l'assorbimento di corrente.
Utilizzare un salvaservo:Per qualsiasi collegamento meccanico che potrebbe subire urti o inceppamenti, aggiungere un accoppiatore flessibile per proteggere gli ingranaggi interni.
Monitorare la temperatura:Se il servo diventa troppo caldo per essere toccato dopo il normale funzionamento, rivalutare la stabilità dell'alimentatore e il carico meccanico.
Seguendo le specifiche, gli schemi elettrici e gli esempi di codice forniti in questa guida, puoi integrare in modo affidabile l'SG90 nei tuoi progetti ed evitare i punti di guasto più comuni.
Tempo di aggiornamento: 01-04-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















