


























SUPPORTO TECNICO


Pubblicato 2026-02-15
Hai mai riscontrato questa situazione: vuoi ilservoper regolare automaticamente la velocità in base alla distanza, ma trovi che gira troppo lentamente per non avere alcun effetto, o gira troppo velocemente come in una convulsione? Quando si utilizzano le onde ultrasoniche per controllare aservo, che velocità dovrebbe essere impostata? Questo è davvero un mal di testa. Oggi, come produttore che armeggia con hardware intelligente da molti anni, ti parlerò di questo argomento e condividerò alcune esperienze reali.
Dobbiamo prima capire una cosa: come funzionano insieme il sensore a ultrasuoni e la scatola dello sterzo. Per dirla semplicemente, il modulo ad ultrasuoni è come i tuoi occhi, che dicono al controller quanto è lontano l'oggetto di fronte; e ilservoè come la tua mano, che deve rispondere in base alle informazioni viste dagli occhi. Se si desidera che la velocità del servo si adatti al variare della distanza, la chiave è stabilire una relazione di mappatura. Ad esempio, quando la distanza dell'oggetto è entro 20 cm, la velocità di rotazione può essere inferiore; quando la distanza è compresa tra 20 e 50 cm la velocità di rotazione è media; quando la distanza supera i 50 cm, la velocità di rotazione è la più veloce. Questa logica sembra semplice, ma c'è molto a cui prestare attenzione quando si regolano effettivamente i parametri, che sono direttamente correlati all'effetto finale.
Ad essere onesti, non esiste una risposta standard a questa domanda. Dipende principalmente dallo scenario in cui lo usi. Se si tratta di un bidone della spazzatura intelligente, la velocità di apertura e chiusura del coperchio è troppo elevata e potrebbe spaventare le persone, quindi da 30 a 45 gradi al secondo è abbastanza adatta; se si tratta di una telecamera con tracciamento automatico, la velocità deve essere maggiore, da 60 a 90 gradi al secondo per tenere il passo con gli oggetti in movimento. Ho visto molti principianti impostare la velocità massima non appena hanno iniziato. Di conseguenza, il servo emette un suono sferragliante e tende a surriscaldarsi. Si consiglia, in base alle esigenze effettive, di provare prima a bassa velocità, quindi aumentarla lentamente per trovare il punto "giusto".
Per ottenere una velocità regolabile, la cosa più importante è gestire il ritardo o il timer nel codice. Se utilizzato, puoi farlo: prima leggere il valore della distanza restituito dal modulo a ultrasuoni, quindi utilizzare la funzione mappa per mappare questo valore sull'intervallo di velocità desiderato. Ad esempio, la distanza da 0 a 100 centimetri corrisponde alla velocità di rotazione da 0 a 90 gradi al secondo. Quindi, nel ciclo, calcola quanto tempo dovrebbe essere ritardato ogni passaggio in base a questa velocità. Ecco un piccolo trucco: usa direttamente il timer () invece del ritardo, in modo che il servo possa continuare a rilevare la distanza mentre il servo sta ruotando e la risposta sia più sensibile.
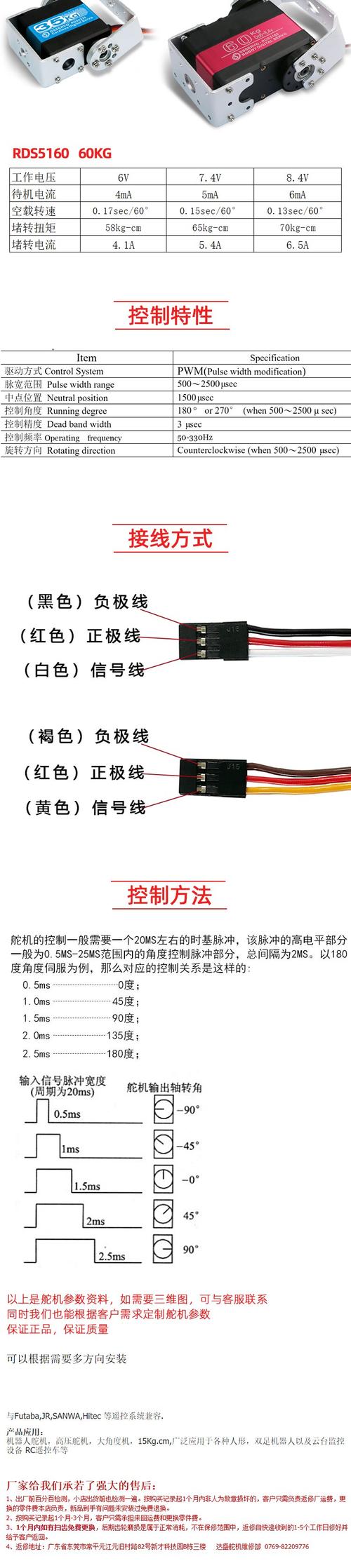
Esistono vari servi sul mercato, i più comuni sono i servi analogici e i servi digitali. I servi analogici ricevono onde PWM e la loro velocità è relativamente stabile, ma il loro campo di regolazione è limitato; i servi digitali rispondono rapidamente e supportano un controllo della velocità più preciso, ma ovviamente sono più costosi. Esistono anche differenze tra ingranaggi in metallo e ingranaggi in plastica. Se si desidera che il servo funzioni a una certa velocità per un lungo periodo, si consiglia di scegliere ingranaggi in metallo, che hanno una dissipazione del calore e una durata molto migliori. Quando si sceglie un servo, non dimenticare di guardare la voce "velocità a vuoto" nella tabella dei parametri, che è la sua velocità massima.
Potresti non pensare che il luogo in cui è installato il sensore a ultrasuoni influirà anche sulla velocità impostata alla fine. Se è installato troppo in alto, gli oggetti bassi potrebbero non essere rilevati; se è installato troppo lontano, il raggio di rilevamento sarà limitato. Ti suggerisco di installare il sensore e il servo allo stesso livello in modo che lo spazio che vedono e si muovono sia coerente. Un altro punto importante è evitare di posizionare il sensore di fronte a una parete liscia o a una superficie curva, che potrebbe causare una riflessione diffusa e portare a letture imprecise. Se la lettura non è accurata, la velocità del servo oscillerà rapidamente e lentamente, il che sarà un'esperienza terribile.
Sulla base delle trappole che ho individuato, vorrei ricordarvi: la prima è il problema delle interferenze. Quando l'onda ultrasonica e la scatola dello sterzo condividono l'alimentazione, è facile influenzarsi a vicenda e le letture salteranno in modo casuale quando la scatola dello sterzo ruota. La soluzione è utilizzare un'alimentazione separata o scaglionare i tempi di lavoro nel programma. Il secondo è il ritardo della risposta. Quando un oggetto si muove velocemente, se la velocità di rotazione non riesce a tenere il passo, il servo apparirà molto lento. A questo punto, è possibile aumentare opportunamente la frequenza di campionamento oppure aggiungere una funzione di previsione all'algoritmo. L'ultimo è la protezione da sovraccarico. Mantenere il servo ad alta velocità per lungo tempo può facilmente bruciarsi. Ricordarsi di aggiungere una logica di interruzione del timeout nel codice.
Dopo aver letto questo, dovresti avere un'idea di come impostare la velocità, giusto? Ma voglio anche chiederti: nel debug vero e proprio, pensi che la cosa più problematica sia il problema della corrispondenza della velocità o i dati instabili del sensore? Ti invitiamo a condividere la tua esperienza nell'area commenti e a dare un Mi piace in modo che più amici creatori possano vedere questo articolo!
Tempo di aggiornamento: 2026-02-15
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















