


























SUPPORTO TECNICO


Pubblicato 2026-02-16
Recentemente, un amico stava armeggiando con una piccola invenzione e voleva applicare il metodo del telecomando a infrarossiservocontrollo, ma ho scoperto che il fileservoruotato in modo casuale o semplicemente non ha risposto. Credo che molti amici che hanno appena iniziato abbiano riscontrato situazioni simili. Vogliono implementare il controllo wireless, ma sono bloccati da una serie di dettagli tecnici. In effetti, utilizzandoun sensore a infrarossi per controllare ilservoconsiste essenzialmente nel far comprendere al servo le "parole" del telecomando. La questione non è così complicata come si immagina. Chiariamolo passo dopo passo.
Per far sì che il servo obbedisca obbedientemente, il nucleo è stabilire la relazione corrispondente tra il segnale infrarosso e l'angolo del servo. Il codice a infrarossi emesso dal telecomando è unico quando si preme ciascun pulsante. Il nostro compito è lasciare che il microcontrollore catturi questo codice e poi lo traduca in istruzioni che il servo possa comprendere. Questo processo è come assegnare una missione specifica a ciascun pulsante del telecomando, come premere "Volume +" per far ruotare il servo di 30 gradi.
Nel funzionamento reale, possiamo implementare questo processo di traduzione attraverso la programmazione. Quando il ricevitore a infrarossi rileva il segnale, il microcontrollore lo decodificherà immediatamente e interrogherà la tabella dei programmi che abbiamo impostato in anticipo. Una volta trovato il codice corrispondente, l'onda PWM corrispondente viene immediatamente inviata al servo per guidarlo a ruotare secondo l'angolo specificato. È come dotare il servo di un paio di orecchie in grado di comprendere i comandi a infrarossi.
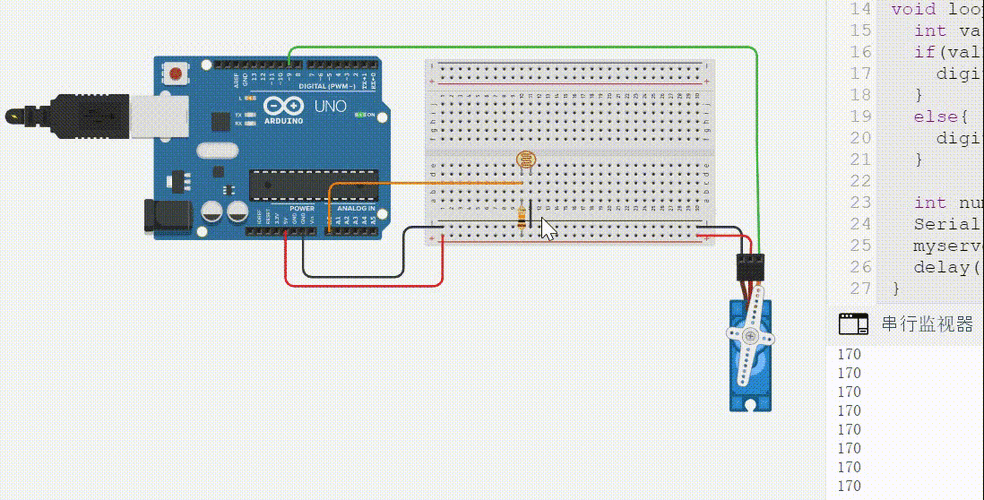
La connessione hardware è il fondamento dell'intero sistema. Se lo colleghi in modo errato, causerà fumo. Innanzitutto bisogna distinguere i tre pin del ricevitore a infrarossi. Solitamente VCC è collegato al polo positivo dell'alimentatore, GND è collegato a terra e il pin OUT è collegato a un pin di interruzione del microcontrollore o ad una normale porta I/O. Questo pin OUT è responsabile della trasmissione del segnale infrarosso ricevuto al cervello del microcontrollore.
La connessione del servo è relativamente fissa. Ha tre fili, quello marrone o nero è il filo di terra, quello rosso è il filo di alimentazione e quello arancione o giallo è il filo del segnale. Collega la linea del segnale al pin di uscita PWM del microcontrollore. Si noti che se la potenza del servo è elevata, è meglio fornire l'alimentazione separatamente. Non attingere energia direttamente dal microcontrollore, altrimenti la scheda madre potrebbe bruciarsi facilmente. Collegare insieme i cavi di terra pubblica in modo che il segnale possa essere trasmesso normalmente.
Sul mercato sono disponibili vari ricevitori a infrarossi e telecomandi e la scelta di quello sbagliato renderà più difficile il debug. Per gli amici alle prime armi, si consiglia di scegliere direttamente un ricevitore a infrarossi con una frequenza portante di 38kHz. Ad esempio, questo è attualmente il modello più versatile ed è adatto alla maggior parte dei telecomandi degli elettrodomestici. Per quanto riguarda il telecomando, basta trovare a casa un telecomando inattivo per la TV o un set-top box. Non è necessario acquistarne uno nuovo.
Se desideri acquistare il tuo telecomando, puoi scegliere un telecomando piccolo con protocollo NEC. La decodifica di questo protocollo è relativamente semplice e i codici più già pronti possono essere trovati online. Cerca di evitare di scegliere telecomandi con protocolli impopolari, altrimenti il processo di decodifica ti farà venire il mal di testa. Ricorda, scegliere l'hardware giusto è metà del successo del tuo progetto.
Il codice è l’anima della logica di controllo, ma non aver paura, molti codici di base possono essere trovati online. Per prima cosa utilizziamo le funzioni della libreria per semplificare il processo, come l'utilizzo della libreria per gestire la ricezione degli infrarossi e l'utilizzo della libreria Servo per controllare il servo. Durante l'inizializzazione, definire innanzitutto il pin di ricezione degli infrarossi e il pin del servo, quindi impostare l'angolo iniziale del servo.
Nella funzione loop, lasciamo che il microcontrollore rilevi continuamente se c'è un segnale infrarosso in arrivo. Una volta che c'è un segnale, leggi il suo valore e poi usa l'istruzione o if per esprimere un giudizio. Se il valore è per un tasto specifico, lascia che il servo si sposti a 30 gradi; se è un'altra chiave, lasciala andare a 90 gradi. Dopo aver scritto il codice, caricalo sul microcontrollore e testalo con il telecomando.
Quando premi il telecomando con grandi aspettative, solo per scoprire che il servo trema o risponde lentamente, non dubitare della tua vita in fretta. La causa più comune delle vibrazioni del servo è un'alimentazione insufficiente. Soprattutto quando il servo richiede una coppia elevata per ruotare, la corrente istantanea abbasserà la tensione, causando il ripristino del microcontrollore. Prova ad alimentare il servo separatamente o a collegare un grande condensatore in parallelo a entrambe le estremità dell'alimentatore per stabilizzare la tensione.
Un'altra causa comune è l'interferenza del segnale a infrarossi. Se nelle vicinanze sono presenti luci forti o altri dispositivi a infrarossi, la ricezione potrebbe essere influenzata. Assicurarsi che il ricevitore a infrarossi non sia bloccato e che il telecomando sia rivolto verso di esso. È inoltre possibile aggiungere al codice alcune elaborazioni antirimbalzo, ad esempio un leggero ritardo prima dell'esecuzione dopo il rilevamento del segnale, in modo da eliminare la possibilità di falsi trigger.
Dopo aver controllato un servo con un pulsante, vorrai sicuramente giocare a qualcosa di più complesso. Ad esempio, utilizzare un telecomando per controllare più servi o ottenere una regolazione continua della velocità. In realtà questo non è difficile. Possiamo utilizzare diversi pulsanti sul telecomando per controllare diversi servi. Ad esempio, il pulsante 1 controlla il servo A e il pulsante 2 controlla il servo B. Non interferiscono tra loro e ciascuno svolge i propri compiti.
Se si desidera controllare la rotazione continua del servo, è possibile definire due tasti, uno per aumentare l'angolo e uno per diminuire l'angolo. Ogni volta che si preme un tasto, l'angolo cambia di 5 o 10 gradi, consentendo una regolazione precisa. Puoi persino progettare un programma che consenta al servo di eseguire automaticamente una serie di procedure di azioni preimpostate dopo aver ricevuto una specifica sequenza di tasti, rendendo immediatamente intelligente un semplice gadget.
Vedendo questo, hai già prurito e vuoi provarlo subito? In effetti, questo metodo di gioco è particolarmente adatto per l'uso nella modifica di auto intelligenti, teste di telecamere o bracci robotici. Vorrei chiedere a tutti, nel vostro progetto creativo, che tipo di azione interessante desiderate di più utilizzare il telecomando a infrarossi per controllare il servo da completare? Benvenuto per lasciare un messaggio nell'area commenti per condividere le tue meravigliose idee. Se trovi utile questo articolo, non dimenticare di mettere mi piace e condividerlo con più amici che ne hanno bisogno!
Tempo di aggiornamento: 2026-02-16
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















