


























SUPPORTO TECNICO


Pubblicato 2026-02-28
Il più grande mal di testa quando si giocaservos è il problema del cablaggio, soprattutto per coppie elevateservoè così. Se il cablaggio è collegato in modo errato, potrebbe non girare affatto o potrebbe bruciarsi direttamente. Molti principianti capiscono questo grande oggetto per la prima volta e spesso sono confusi quando guardano i tre fili e non sanno come iniziare. Oggi spiegheremo a fondo questo argomento in modo che tu possa iniziare subito dopo averlo letto.
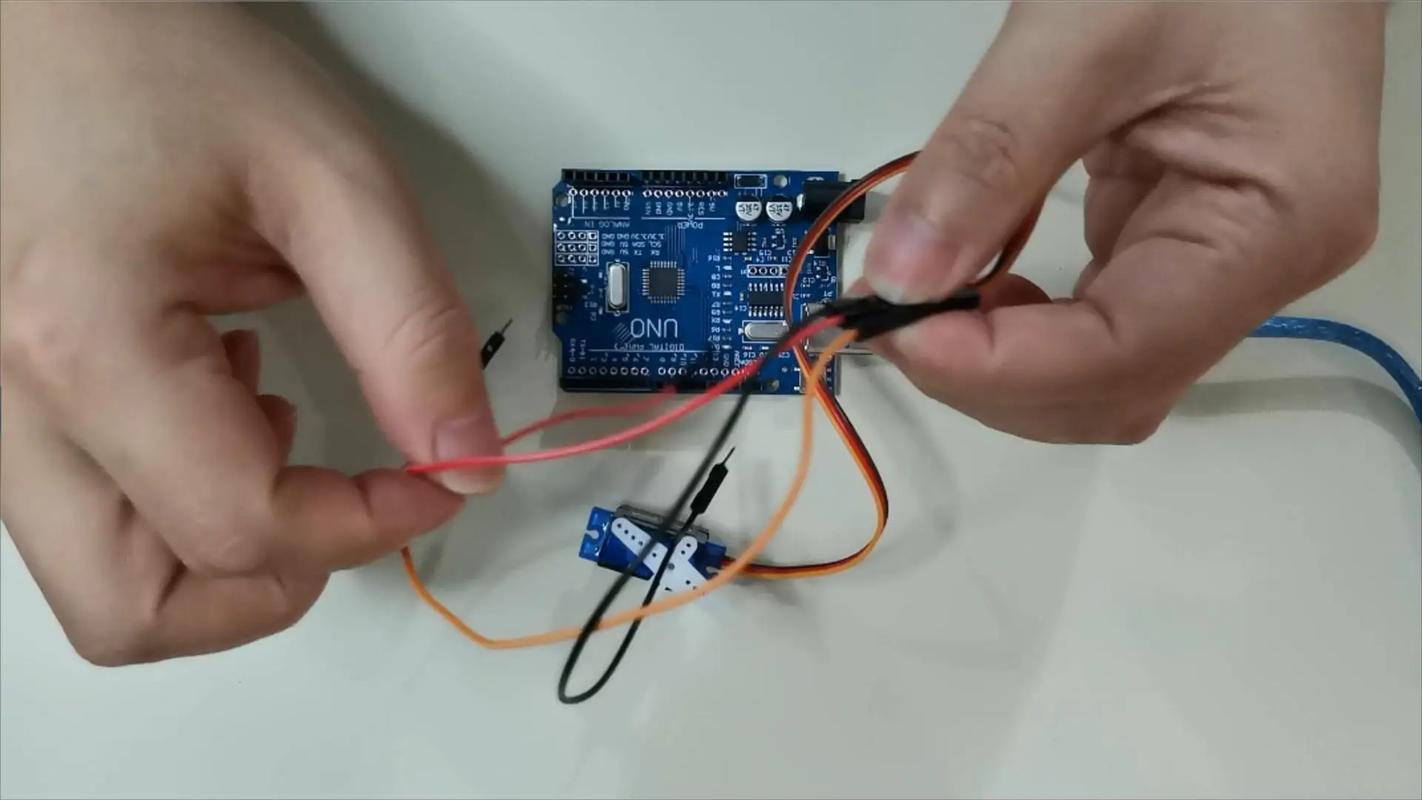
I colori dei tre fili che si estendono dal servo sono solitamente relativamente fissi. Il filo rosso al centro, non c'è bisogno di pensarci, deve essere il terminale positivo dell'alimentatore, responsabile di fornire energia al servo. Il filo marrone o nero è il polo negativo, chiamato anche filo di terra, e deve essere collegato al polo negativo dell'alimentazione. La rimanente linea arancione, gialla o bianca è la linea del segnale, che è responsabile di ricevere istruzioni dalla scheda di controllo e di indicare al servo quale angolo girare. Ricorda questi tre colori e il cablaggio sarà metà dell'opera.
Molti amici non riescono a distinguere tra poli positivi e negativi. In effetti, esiste un modo semplice per distinguerli. Se si osserva attentamente il connettore del cavo del servo, di solito è presente un piccolo smusso o rigonfiamento. Questo design infallibile impedisce di collegarlo al contrario. Se proprio non riesci a dirlo, ricorda che il filo rosso della maggior parte dei servi è al centro, con i fili di segnale e di terra su entrambi i lati. Questa regola è molto generale.
Questa cosa è una tigre elettrica. Durante il funzionamento, la corrente può raggiungere 1 A o anche superiore. Quando il rotore è bloccato, la corrente è ancora più terrificante. Non devi aspettarti di assorbire energia direttamente dal pin da 5 V del Raspberry Pi o del Raspberry Pi, poiché molto probabilmente brucerebbe la scheda madre. È necessario preparare un alimentatore separato, come un pacco batteria da 7,2 V o un modulo di stabilizzazione della tensione ad alta corrente in grado di fornire 5-6 V.
Prestare particolare attenzione durante il cablaggio. Il polo negativo dell'alimentazione del servo deve essere collegato al GND della scheda di controllo. Questo si chiama terreno comune. Se non è collegato, il segnale sarà disturbato e il servo tremerà o non obbedirà al comando. È possibile collegare il terminale negativo dell'alimentatore al GND della scheda di controllo con un cavo Dupont, in modo che la trasmissione del segnale sia stabile.
La linea del segnale deve essere collegata al pin della scheda di controllo che supporta l'uscita PWM. Per UNO, sono i pin digitali contrassegnati con il simbolo "~". Se si tratta di un Raspberry Pi, sebbene non disponga di PWM hardware, può essere simulato tramite software o utilizzare una scheda servo driver specializzata per emettere segnali e l'effetto sarà molto migliore.
Il metodo di connessione è molto semplice, proprio come l'inserimento di elementi costitutivi. Ma fai attenzione, non collegare mai la linea del segnale all'alimentazione o GND. Se utilizzi una scheda servoazionamento, sarà più semplice. Basta collegare il servo direttamente al canale della scheda driver, quindi collegare la scheda driver e la scheda di controllo. La scheda driver può anche aiutare a risolvere il problema dell'alimentazione.
L'errore più comune è la potenza insufficiente. Scrivi il programma con grandi aspettative, ma il servo trema solo leggermente e poi smette di muoversi. Nove volte su dieci l'alimentazione elettrica non tiene il passo. Inoltre, la linea del segnale è collegata a un normale pin digitale invece che a un pin PWM. In questo modo, il servo rimarrà solo in una posizione e non potrà controllare con precisione l'angolo.
Inoltre, assicurarsi di spegnere l'alimentazione prima di eseguire il cablaggio. Se si verifica accidentalmente un cortocircuito durante il funzionamento sotto tensione, voleranno scintille e la scheda di controllo del servo verrà rottamata in un istante. Sviluppare la buona abitudine di controllare il cablaggio dopo averlo collegato per assicurarsi che non vi siano problemi prima di accendere l'alimentazione. Questo può far risparmiare un sacco di soldi sprecati.
Dopo aver collegato i fili, testalo con un semplice programma. Ad esempio, lascia che il servo ruoti lentamente da 0 gradi a 180 gradi, e poi di nuovo indietro. Se il servo si muove agevolmente senza oscillazioni o rumori anomali, congratulazioni, il cablaggio è avvenuto correttamente. Se non funziona, interrompere rapidamente l'alimentazione e verificare se la messa a terra comune non è corretta o la tensione di alimentazione non è sufficiente.
️ Un piccolo consiglio: quando l'alimentazione è spenta, ruotare delicatamente a mano il disco di uscita del servo. Non deve girare perché il riduttore è bloccato. Se riesce a girare facilmente, l'ingranaggio interno del servo potrebbe essere danneggiato. Dopo l'accensione, il servo dovrebbe essere in grado di fermarsi stabilmente nella posizione designata. Dovresti sentire molta resistenza quando lo togli con le mani. Questo è considerato normale.
La coppia è elevata e l'ingranaggio in metallo è durevole. È particolarmente adatto per l'uso nei giunti dei robot, come la realizzazione di un robot a sei zampe o di un braccio robotico. È perfettamente sufficiente utilizzarlo anche per fornire potenza di sterzo per modellini di auto e barche telecomandati. Puoi anche realizzare un gimbal fai-da-te e fissare la fotocamera sul servo per realizzare il tracciamento automatico del volto.
In effetti, il gameplay del servo è molto più che semplicemente girarsi. Combinando vari sensori, come quelli a ultrasuoni e a infrarossi, può percepire l'ambiente e rispondere. Puoi usarlo per creare un cestino della spazzatura che si apre e si chiude automaticamente o un supporto per pannello solare che ruota in base all'angolo di luce. Finché vengono gettate le basi del cablaggio, il resto dipende interamente dalla tua immaginazione.
Vedendo questo, dovresti avere un'idea del cablaggio. Quando hai collegato il servo per la prima volta, hai riscontrato problemi dovuti a una sequenza di cablaggio errata o a un'alimentazione insufficiente? Benvenuto per condividere la tua esperienza nell'area commenti. Comunichiamo ed evitiamo le trappole insieme. Se lo trovi utile, non dimenticare di mettere un mi piace e condividerlo con più amici!
Tempo di aggiornamento: 28-02-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.




















