


























SUPPORTO TECNICO


Pubblicato 2026-02-26
Credo che molti amici abbiano riscontrato questo problema armeggiando con robot o gadget fai-da-te: ilservoè stato acquistato e collegato alla corrente, ma semplicemente non si è mosso, o ha girato solo stupidamente in una direzione. Vuoi che si muova in modo flessibile come un collo umano e guidi una fotocamera o un piccolo puntatore laser per colpire dove vuoi, ma non sai da dove cominciare. Non preoccuparti, sto realizzando davvero ilservol'obbedienza al gimbal non è così complicata come pensi. Oggi parliamo di come controllarne la rotazioneservogiunto cardanico.
Per dirla senza mezzi termini, un gimbal a due assi può muoversi su, giù, sinistra e destra, facendo affidamento su due servi per svolgere i rispettivi compiti. Un tubo è nella direzione orizzontale, che è ciò che spesso chiamiamo rotazione sinistra e destra, e il termine è "direzione" o "traslazione"; l'altro tubo è in direzione verticale, cioè quando si alza la testa e si abbassa la testa, il termine è "beccheggio". Devi prima fissare i due servi e costruire la struttura meccanica del gimbal in modo che possano essere responsabili di una direzione senza interferire tra loro. Questo è proprio come un collo umano. Deve essere in grado di girare la testa a destra e a sinistra e annuire. Si basa anche su diversi gruppi muscolari. Pertanto, il primo passo per controllare la rotazione è capire in quale direzione si desidera che si muova il gimbal, che corrisponde a quale servo sta funzionando.
Molti principianti si confondono quando vedono le parole "segnale di controllo" e "PWM" e sentono di essere molto avanzati. In effetti, è molto semplice. Puoi pensarlo come l'invio di un "comando temporale" al servo. La posizione dell'asse dello sterzo non è determinata dalla tensione, ma da un impulso di alto livello della durata di pochi millisecondi. Generalmente, questo impulso varia tra 1 millisecondo e 2 millisecondi. Invia un impulso di 1 millisecondo e il servo girerà all'estrema sinistra; invia un impulso di 1,5 millisecondi e girerà al centro; invia un impulso di 2 millisecondi e girerà all'estrema destra. Affinché il gimbal ruoti continuamente, dipende dalla scheda di controllo principale (come STM32) inviare continuamente questo impulso 50 volte al secondo e l'ampiezza dell'impulso cambia leggermente ogni volta.
Poiché il principio è inviare impulsi, è molto intuitivo implementarlo nel codice. Su una piattaforma di questo tipo è possibile utilizzare direttamente la "libreria server" già pronta senza dover calcolare da soli il tempo. Ad esempio, se scrivi.scrivi(90), genererà automaticamente un impulso che può ruotare il servo nella posizione di 90 gradi. Vuoi che il gimbal si muova lentamente in cerchio da sinistra a destra? Scrivi un ciclo for per aumentare lentamente l'angolo da 0 a 180, con un piccolo ritardo nel mezzo, e il gimbal ruoterà senza intoppi. Per coloro che sono nuovi alle applicazioni degli ingranaggi dello sterzo, questo è sicuramente il modo più veloce per iniziare. Non è necessario capire come lo strato inferiore genera gli impulsi, devi solo dire al servo "a quale angolo andare".
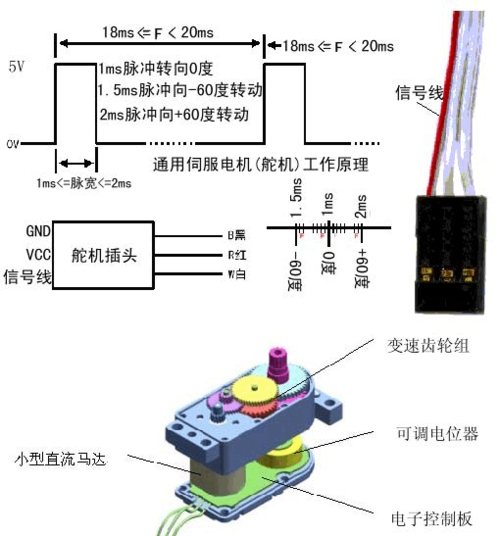
Se vuoi sentire in modo più intuitivo "colpire dove punti", sarebbe un'esperienza molto interessante utilizzare un potenziometro (quel tipo di manopola rotante) per controllare direttamente il gimbal. È possibile collegare il potenziometro al pin di ingresso analogico del microcontrollore. Il programma leggerà continuamente la posizione corrente della manopola (come un valore da 0 a 1023), e quindi "mapperà" questo valore proporzionalmente al valore dell'angolo richiesto dal servo (come da 0 a 180). Quando giri lentamente il potenziometro a mano, il servo del gimbal ruoterà in modo sincrono, come se fosse collegato da una biella invisibile. Questo senso di feedback di controllo in tempo reale ti darà una comprensione più profonda del "controllo".
Naturalmente il solo controllo manuale non è sufficiente. Se vuoi che il gimbal si mantenga in piano o segua automaticamente un bersaglio, devi utilizzare, ad esempio, un sensore di assetto. È possibile installare il sensore sul gimbal e rileverà in tempo reale se il gimbal è attualmente inclinato. Una volta che c'è una forza esterna che lo rende storto, il programma leggerà immediatamente i dati di deviazione, li calcolerà rapidamente tramite l'algoritmo PID e quindi invierà immediatamente un'istruzione di correzione dell'angolo allo sterzo. L'intero processo viene completato in pochi millisecondi, dandoti la sensazione che, indipendentemente da come scuoti la base, la fotocamera sul gimbal rimarrà sempre immobile, stabile come una montagna. Questa tecnologia di stabilizzazione automatica dell'immagine è ampiamente utilizzata nella fotografia aerea e negli stabilizzatori portatili.
Devo ricordarvi una trappola nella quale è particolarmente facile incorrere, e cioè il problema dell'alimentazione elettrica. Quando il servo viene avviato e caricato, la corrente istantanea sarà molto elevata. Se si utilizza un normale alimentatore USB per microcontrollore per azionarlo, la tensione verrà abbassata immediatamente, causando il ripristino del microcontrollore o la contrazione o la vibrazione diretta del servo. Pertanto, non lesinare sull'alimentazione. È meglio preparare una batteria esterna o un modulo di stabilizzazione della tensione per il servo con sufficiente capacità di uscita di corrente e collegare insieme i fili di terra dell'alimentazione del microcontrollore e del servo. Solo in questo modo l'intero sistema può funzionare stabilmente e tutti i codici e la logica di controllo precedenti possono essere utilizzati.
Dopo aver visto questo, hai un'idea migliore di come controllare la rotazione del servo e del gimbal? Dal semplice invio di impulsi, all'utilizzo del codice per ottenere il controllo dell'angolo, all'aggiunta della stabilizzazione automatica del sensore, ogni passaggio può portarti sempre più vicino al tuo prodotto creativo. Vuoi provarlo subito e installare un collo flessibile sulla tua fotocamera o gadget? Se riscontri problemi durante la selezione di un servo o la progettazione di una struttura, potresti anche visitare alcuni forum di robot professionali o siti Web ufficiali dell'azienda, dove sono disponibili soluzioni già pronte e prodotti maturi come riferimento. Dopo aver parlato così tanto, all'improvviso mi sono incuriosito, per quali progetti interessanti vuoi utilizzare questo servo gimbal? Condividilo nell'area commenti, metti mi piace e lascia che più amici pratici vedano le tue idee!
Tempo di aggiornamento: 26-02-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















