


























テクニカルサポート


発行済み 2026-04-21
どうか気になる場合は、サーボモーターには別のドライバーボードが必要です。その直接の答えは次のとおりです。常にではありませんが、多くの実際的な状況ではそうです。定番の趣味サーボ制御回路と小型 DC モーターが内蔵されており、マイクロコントローラーの PWM (パルス幅変調) ピンで直接駆動できます。ただし、複数の制御が必要な場合は、サーボ大型サーボに電力を供給したり、スムーズでジッターのない動作を実現するには、専用のドライバーボードが不可欠になります。この記事では、追加のドライバーなしでサーボが機能する理由、ドライバーを追加する必要がある場合、および実際のプロジェクトに基づいて決定する方法を正確に説明します。
すべての標準位置サーボ (ロボット アーム、RC カー、アニマトロニクスで使用される種類) の内部には、次の 3 つの主要コンポーネントがあります。
DCモーター
減速機一式
小さな制御基板位置フィードバック用のポテンショメータ付き
この内部制御ボードは PWM 信号 (通常 50Hz、パルス幅 1ms ~ 2ms) を受信し、DC モーターを直接駆動して出力シャフトを指令された角度まで回転させます。制御電子機器はすでにサーボの内部にあるため、基本的な操作には外部ドライバーボードは必要ありません– サーボの信号線をマイクロコントローラーのピンに直接接続し、その電源線を適切な外部電源 (通常は 4.8V ~ 6.0V) に接続できます。
実際の例:単純なロボットの爪を構築する初心者は、1 つの小さなサーボをマイクロコントローラー ボードに直接接続することがよくあります。マイコンが PWM 信号を生成し、追加のドライバーなしでサーボが正しく動作します。これは、1 つまたは 2 つの小型サーボでは問題なく機能します。
単一のサーボを直接制御できる場合でも、ドライバー ボードがないと多くのプロジェクトが失敗したり、パフォーマンスが低下したりします。ドライバー ボードが必要となる最も一般的な 3 つのケースを次に示します。
マイクロコントローラーの PWM ピンの数は限られています (たとえば、一般的な低コストのボードにはハードウェア PWM 出力が 6 つしかない場合があります)。さらに重要なことは、ソフトウェア ビットバンギングを使用して複数のサーボに対して正確な PWM 信号を生成すると、大量の CPU 時間が消費され、ジッター、パルスの欠落、および不規則な動作が発生するということです。
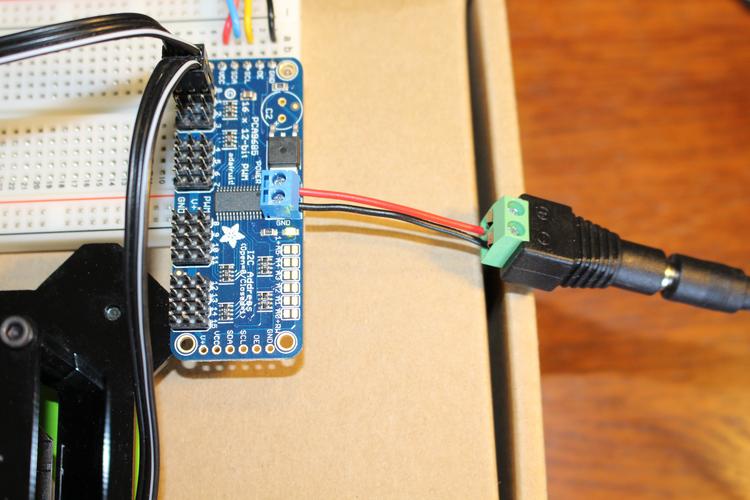
サーボ ドライバー ボード (16 チャネル PWM ドライバーなど) は、マイクロコントローラーから PWM 生成をオフロードします。 I²C インターフェイス (マイクロコントローラー上の 2 つのピンのみ) を使用して、安定したジッターのないタイミングで最大 16 個のサーボを同時に制御します。
実際の例:6 足歩行ロボット (12 個のサーボ) を構築する愛好家は、すべてのサーボをマイクロコントローラーに直接接続しようとしました。脚が不規則にけいれんし、マイクロコントローラーが過熱しました。 16 チャンネルのサーボ ドライバー ボードを追加すると、すべての脚がスムーズに動き、マイクロコントローラーは I²C 経由で簡単な位置コマンドを送信するだけで済みました。
1 つの小型サーボは、移動時に 200 ~ 500mA、停止時に最大 1A を消費します。ほとんどのマイクロコントローラー ボードは、5V ピンから合計 500mA を超える電流を供給できません。たとえ 2 つのサーボでもボードの 5V 出力に直接接続すると、電圧が低下し、マイクロコントローラーがリセットされたり、サーボが予期せぬ動作をしたりすることがあります。
ドライバーボードは次のようにしてこれを解決します。
から直接電力を引き出す独立した高電流電源(例:5V/5A)
各サーボチャネルに専用の電源トレースとコンデンサを提供
サーボ電源を繊細なマイクロコントローラーロジックから分離
実際の例:あるメーカーは、2 つの中型サーボを備えたパンチルト カメラ マウントを作成しました。両方のサーボが同時に動作すると、マイクロコントローラーがランダムに再起動します。この問題は、5V/3A AC アダプターで駆動されるドライバー ボードを使用するとすぐに解消されました。マイクロコントローラーは低電流ロジック信号のみを供給するようになりました。
標準の位置サーボは 50Hz の PWM 信号を想定しています。連続回転サーボ(ホイールとして使用されることが多い) も PWM で動作しますが、ニュートラル位置であっても常に信号を更新する必要があります。専用のドライバーがないと、ソフトウェアのタイミング エラーによって不要なドリフトが発生します。
大型サーボ (産業用ロボットや頑丈な RC モデルなど) は、多くの場合 7.4 V または 12 V で動作します。マイクロコントローラーの 5V ロジック レベルでは、制御入力を確実に直接駆動することができず、マイクロコントローラーの電源ピンは電流を処理できません。レベルシフトと外部電源調整機能を備えたドライバーボードが必須になります。
次の場合はドライバー ボードを安全にスキップできます。全て次の条件のうち、次の条件が当てはまります。
あなたがコントロールしているのです標準的な小型サーボは 1 つまたは 2 つだけ(例:9g~20gサイズ)
マイクロコントローラーの 5V ピンは少なくとも 1A を供給できます (ボードの仕様を確認してください)
サーボは頻繁に動作せず、高い機械的負荷がかかることはありません
非専用ピンでソフトウェアベースの PWM を使用しても問題ありません (ただし、タイミングの精度は低くなる可能性があります)。
実際の例:10 分ごとに 1 つの小さなサーボを動かすシンプルなソーラー トラッカーは、ドライバー ボードがなくても完璧に機能します。マイクロコントローラーはほとんどの時間スリープ状態にあり、サーボがピーク電流を消費するのは 0.5 秒だけです。
多くの初心者は、サーボ モーターをステッピング モーターや通常の DC モーターと混同します。あ裸の DC モーターまたはステッピングモーター制御電子機器が組み込まれていないため、外部ドライバー (H ブリッジまたはステッパー ドライバー) が必ず必要になります。サーボ モーターはユニークで、ドライバーがケーシング内に統合されています。これが、ステッパーでは同じことができないのに、サーボを「直接」接続できる理由です。
不必要なハードウェアにお金を無駄にせずに最高のパフォーマンスを得るには、次の単純な決定プロセスを使用します。
1. サーボを数える– サーボが 3 つ以上の場合 → ドライバー ボード (例: 16 チャンネル PWM ドライバー) を購入します。
2. 電源を確認してください– すべてのサーボの合計ストール電流がマイクロコントローラーの 5V ピン定格を超える場合 → 外部電源を備えたドライバー ボードを使用します。
3. ジッターのテスト– 簡単なスイーププログラムを作成します。停止中にサーボがけいれんしたり振動したりする場合は、ドライバーボードを追加してください。
4. その他すべての場合– ドライバー ボードなしで開始しますが、低コストのバックアップ ($5 ~ $10) としてドライバー ボードを保持します。
最終的な核心的な結論を繰り返します:サーボモーターはそうではありませんいつも内部に制御回路があるためドライバーボードが必要です。ただし、信頼性の高いマルチサーボ プロジェクト、大電流アプリケーション、またはジッターのないパフォーマンスを実現するには、専用ドライバー ボードは役立つだけでなく、不可欠です。
アクションステップ:部品を購入する前に、サーボの合計ストール電流を計算し (データシートで値を見つけてください)、それをマイクロコントローラーの最大出力電流と比較してください。数が大きい場合、または 2 つ以上のサーボを使用する予定がある場合は、サーボと一緒にドライバー ボードを注文してください。これにより、デバッグにかかる時間を節約し、コンポーネントの損傷を防ぐことができます。
更新時間:2026-04-21






















