


























SUPORTE TÉCNICO


Publicado 2026-02-19
Muitos amigos que brincam de aeromodelos ou fazem pequenos robôs, quando entram em contato pela primeira vez com umservo, a questão mais problemática é: como ajustá-lo para a posição neutra? Observando o braço de direção balançando para frente e para trás, murmurei em meu coração. Não se preocupe, este é realmente um obstáculo que todo novato encontrará. Ajustando oservopara a posição neutra é o primeiro passo para fazê-lo ouvir você e também é a base para todas as ações precisas subsequentes. Hoje falaremos sobre esse assunto e garanto que você entenderá e aprenderá assim que ver.
Simplificando, a posição neutra doservoé o seu ponto de referência para “descansar” e “pronto para partir”. Você pode pensar nisso como a posição das 12 horas de um relógio ou o volante retornando à posição reta. Nesta posição, o ângulo de saída do servo é de 90 graus, que é o ponto médio de seu percurso. Somente entendendo isso você poderá saber que girar o servo 45 graus para a esquerda na verdade significa girá-lo da posição neutra para 45 graus, em vez de pular diretamente de 0 graus.
Muitos amigos inseriram diretamente o braço do servo no servo, apenas para descobrir que ele estava torto, não importa como foram inseridos. Depois de apertar os parafusos, descobriram que não conseguia retornar ao centro. Isto ocorre principalmente porque existe um potenciômetro dentro do servo, que requer um sinal elétrico para determinar a referência. Se você instalar difícil sem energia para o servo, é só uma questão de sorte. Assim como ajustar os ponteiros de um relógio com os olhos vendados, como ele pode ser ajustado na hora certa? Portanto, antes de instalar o braço servo, o primeiro passo deve ser ligar o servo.
Este é o método mais comum e simples. Primeiro, redefina todos os botões de ajuste dos canais correspondentes em seu controle remoto para zero. Em seguida, ligue o receptor e o servo. Neste momento, o servo irá girar automaticamente para uma posição que atualmente considera ser 90 graus. Se você achar que o braço do servo está um pouco para a esquerda ou para a direita após a instalação, você pode usar os botões de ajuste fino no controle remoto para ajustá-lo passo a passo até que o braço do servo esteja completamente paralelo à linha neutra desejada. ️Lembre-se de que o ajuste fino é um ajuste fino e não pode ser corrigido em uma grande faixa. Se desviar muito, pode ser um problema no próprio servo.
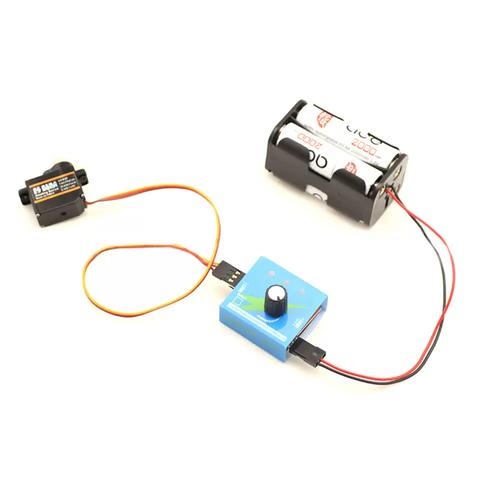
Se você está apenas fazendo testes, ou usando o controle do microcontrolador e não conectando o controle remoto, existe um jeito. Você precisa de um dispositivo que possa emitir um sinal PWM específico, por exemplo. O sinal de controle do aparelho de direção é um pulso de alto nível com período de 20ms, cuja largura de pulso de 1,5ms corresponde à posição neutra. Escreva um pequeno trecho de código para permitir que o microcontrolador envie continuamente uma largura de pulso de 1,5 ms para a linha de sinal do servo. Depois que a energia for aplicada, o servo irá parar firmemente em seu ponto central mecânico.
Para avaliar se o servo está realmente na posição neutra, não basta apenas olhar para ele. Você pode encontrar uma régua quadrada ou usar a borda em ângulo reto de um pedaço de papel A4 e colocá-la contra a lateral do braço do servo e da caixa do servo. Verifique se o braço do servo está perpendicular à borda da carcaça do servo. Ainda mais simples, você pode segurar suavemente o braço do servo com a mão e sentir a resistência dele balançando para a esquerda e para a direita. Na posição neutra, a resistência à rotação para a esquerda e para a direita deve ser basicamente a mesma. Se estiver particularmente apertado de um lado, não deve ficar no meio.
Ao ajustar a caixa de direção, há vários detalhes que precisam ser observados. ️Primeiro, a fonte de alimentação do servo deve estar estável. Se você usar uma bateria, certifique-se de que a energia seja suficiente. A tensão instável fará com que o ponto neutro se desvie. ️Segundo, se for um servo com engrenagem de metal, não use força bruta para quebrar o braço do servo, pois pode danificar a engrenagem interna. ️Terceiro, alguns servos digitais possuem uma função de “partida lenta”. Depois de ligar, ele irá oscilar lentamente para o ponto neutro. Isso é normal. Espere até que estabilize antes de ajustar.
Se a posição neutra não for ajustada corretamente, seu avião poderá continuar girando enquanto voa, o carro não poderá andar em linha reta e o braço robótico poderá não ser capaz de agarrar as coisas com precisão. É como se seu volante estivesse sempre torto e você tivesse que puxar com força o tempo todo para seguir em frente. Não é apenas cansativo, mas também consome eletricidade, e a caixa de direção pode facilmente aquecer e queimar. Portanto, gastar alguns minutos para ajustá-lo corretamente tornará a depuração subsequente mais eficiente e mais suave.
Dito tudo isso, me pergunto se você já encontrou algum fenômeno particularmente estranho ao ajustar a direção. Por exemplo, o servo vibra sozinho ou não se move? Bem vindo ao chat na área de comentários, talvez eu possa te ajudar a analisar. Se você achou este artigo útil, não esqueça de curtir e compartilhar com mais amigos que brincam com modelos!
Hora de atualização: 19/02/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















