


























SUPORTE TÉCNICO


Publicado 2026-03-23
Você já se deparou com esta situação: você comprou um microservo servoe queria escrever um programa para controlá-lo. Porém, depois de muito tempo pesquisando online, o código não funcionou ou a biblioteca não pôde ser instalada? Não se preocupe, hoje falaremos sobre como usar o 3 para pegar esse carinha e deixá-lo obediente em seus projetos criativos.
Sua sintaxe concisa e seu rico ecossistema de biblioteca o tornam uma excelente escolha para o desenvolvimento rápido de prototipagem. Ao controlar microservos, você não precisa se preocupar com os detalhes dos registros subjacentes, como a linguagem C. Você pode fazer o servo girar com apenas algumas linhas de código. Isto é simplesmente uma palha que salva vidas para verificação rápida na fase de inovação do produto. Além disso, pode ser facilmente combinado com funções avançadas, como reconhecimento visual e análise de dados, fazendo com que a caixa de direção não seja mais apenas um simples atuador, mas uma parte do sistema inteligente.
As principais soluções do mercado são RPi.GPIO e .
Se você estiver usando um Raspberry Pi, RPi.GPIO é a escolha mais direta. Ele pode operar diretamente os pinos GPIO para gerar sinais PWM. No entanto, deve-se notar que este pacote tem certas limitações no suporte à precisão PWM, o que pode facilmente fazer o servo vibrar.
Em comparação, o pacote Servo parece mais profissional. Ele usa hardware PWM ou software PWM para controlar com precisão a largura do pulso, para que o servo gire suavemente e sem problemas. É recomendável usar este pacote porque seu encapsulamento é mais completo, suporta controle simultâneo de vários servos e o código é mais elegante de escrever.
O primeiro passo é certificar-se de que seu 3 foi instalado com sucesso. Em seguida, digite exatamente:pip3 --servono terminal. A execução deste comando instalará completamente todas as bibliotecas e dependências necessárias.
1. Se você estiver usando um Raspberry Pi, também precisará habilitar a função I2C ou PWM de hardware. Você pode abrir a interface correspondente em raspi-. 2. Ao fazer conexões de hardware, preste atenção especial aos três fios do servo: o fio marrom precisa ser conectado ao GND, o fio vermelho precisa ser conectado à fonte de alimentação de 5V e o fio laranja precisa ser conectado ao pino de controle GPIO. Certifique-se de não conectá-lo inversamente, caso contrário o servo pode queimar. Recomenda-se usar uma fonte de alimentação externa de 5 V como fonte de alimentação. Não retire energia diretamente dos pinos do Raspberry Pi, pois a corrente não será suficiente.
O código a seguir tem a função de fazer o servo balançar para frente e para trás na faixa de 0 graus a 180 graus. Primeiro, usequadroepwmioinicializar o canal PWM para construir um ambiente básico para a operação do servo. A seguir, crie umservoobjeto para facilitar o controle preciso do servo. Entre eles, o ponto-chave é a declaração de atribuição, comoservo.ângulo = 0Através desta declaração, o ângulo em que o servo deseja girar pode ser definido de forma flexível. Ou seja, quantos graus você deseja que o servo gire, você pode atribuir a ele o grau correspondente. Se você quiser que o servo se mova mais lentamente para poder observar sua rotação com mais clareza, você pode adicionar umhora.sonodeclaração para alcançar esse propósito.
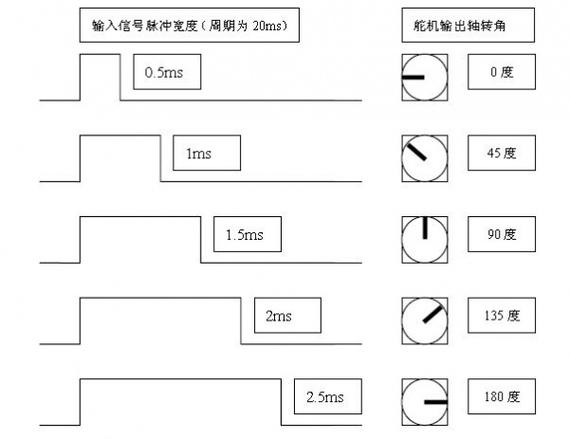
Se o servo emitir um ruído anormal, geralmente há um problema com a frequência do pulso. O período PWM padrão do microservo é de 20ms. Quando seu tempo de alto nível está na faixa de 0,5ms a 2,5ms, o ângulo correspondente é de 0 a 180 graus. A biblioteca padroniza esta configuração de parâmetro, portanto não há necessidade de o usuário calcular os valores relevantes sozinho.
Quando o projeto exige que vários servos trabalhem juntos, como na fabricação de um braço robótico ou de um robô multiarticular, o uso da biblioteca é particularmente conveniente. Você só precisa criar váriosservoobjetos, cada um vinculado a um pino GPIO diferente, e então definir seus ângulos individualmente. Existe um pequeno truque: ao usarpwmio., colocarDefina como 50, que é a frequência padrão do servo. Se for esse tipo de placa de expansão PWM, o código é quase o mesmo. Você só precisa alterar o endereço I2C para controlar 16 servos ao mesmo tempo, o que é muito adequado para projetos complexos.
Muitos amigos relataram que o servo parou de se mover repentinamente ou o ângulo não estava correto. O motivo mais comum é um problema na fonte de alimentação. A corrente instantânea de um microservo pode atingir mais de 1A. Se vários servos forem ativados ao mesmo tempo, uma queda instantânea de tensão fará com que o Raspberry Pi reinicie. A solução é usar uma fonte de alimentação regulada separada para alimentar o servo, e o fio terra deve ser conectado ao terra do Raspberry Pi. Outra armadilha é a faixa de ângulo. O limite mecânico de alguns modelos é de apenas 0-120 graus. Se você forçá-lo a dar um comando de 180 graus, a caixa de câmbio ficará presa e emitirá um som de “clique”. Neste momento, desligue imediatamente e verifique os parâmetros específicos do modelo do servo.
Ao controlar o micro-servo servo, você está transformando rapidamente sua criatividade em um trabalho móvel. Da depuração de servo único à ligação multicanal, isso pode ajudar você a economizar muito tempo de depuração. Agora que você leu isso, você também pode se perguntar: em seu próximo produto inovador, que tipo de efeitos de ação esses pequenos servos podem ajudar seu projeto a alcançar, que você nunca ousou pensar antes?
Hora de atualização: 23/03/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















