


























SUPORTE TÉCNICO


Publicado 2026-03-08
Recentemente, muitos amigos me perguntaram se queriam usar o Raspberry Pi para fazer algumas pequenas invenções, mas não sabem como fazer oservomover. Você também já se deparou com esse tipo de constrangimento - oservoestá conectado e o código é inserido, mas ele simplesmente não se move ou treme como uma convulsão? Não se preocupe, este é na verdade um obstáculo que todo fabricante enfrentará. Hoje vou te levar passo a passo para quebrar esse osso duro, para que oservona sua mão pode virar obedientemente para o ângulo especificado.
Se você quiser usar um Raspberry Pi para controlar um servo, primeiro você deve entender como os dois “conversam”. O servo não consegue entender os sinais digitais do Raspberry Pi. Ele reconhece apenas um sinal de forma de onda chamado PWM (Modulação por Largura de Pulso). Simplificando, ele envia pulsos elétricos de diferentes larguras para a caixa de direção para dizer-lhe para “girar para a posição intermediária” ou “girar para a extrema direita”. O próprio Raspberry Pi possui pinos PWM de hardware, mas o número é limitado, então muitas pessoas usam simulação de software. Você só precisa conectar a linha de sinal do servo ao pino GPIO do Raspberry Pi e, em seguida, gerar o sinal de pulso correspondente por meio de programação, e o servo será capaz de entender suas instruções.
Há uma variedade de servos no mercado e escolher o errado pode ser problemático. Para começar com o Raspberry Pi, recomendo fortemente que você use o micro servo SG90 9g comum. Este pequeno servo é barato e resistente, e o requisito de tensão é exatamente os 5V que o Raspberry Pi pode fornecer. Se você quiser fazer algum trabalho pesado, como controlar um braço robótico, então você deve considerar este tipo de servo de alto torque com engrenagem de metal. No entanto, gostaria de lembrar que a grande corrente de trabalho do servo pode ser demais para o Raspberry Pi, por isso é melhor alimentá-lo separadamente. Há outro ponto que é fácil de ignorar. Existem dois tipos de servos: analógicos e digitais. Para iniciantes, o analógico é suficiente. A lógica de controle é simples e direta.
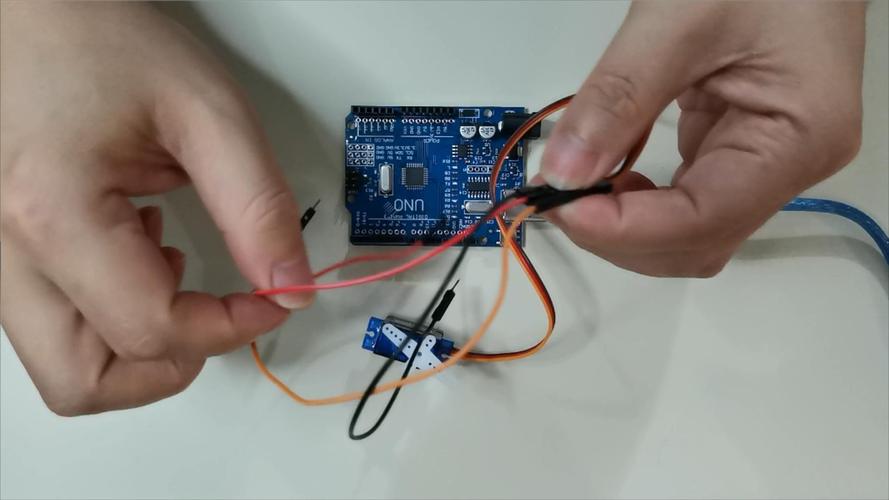
A etapa de fiação parece simples, mas muitas pessoas tropeçam nela. O erro mais comum é conectar os pólos positivo e negativo de forma inversa. Você pode sentir um cheiro pegajoso em um instante e o servo será descartado. É preciso lembrar: o fio vermelho vai para a fonte de alimentação de 5V, o fio marrom ou preto vai para o terra e o fio de sinal amarelo ou laranja vai para o pino GPIO. Outra armadilha é a fonte de alimentação insuficiente. O pino de 5V do Raspberry Pi tem uma corrente de saída limitada. Se mais de dois servos forem usados, a tensão será reduzida, fazendo com que o Raspberry Pi reinicie. Uma abordagem segura é usar uma fonte de alimentação externa apenas para o servo e conectar o terra da fonte de alimentação ao terra do Raspberry Pi para que o sinal possa ser transmitido normalmente.
Antes de começar a escrever código oficialmente, você deve primeiro compreender completamente os segredos por trás da rotação do servo. O ângulo do servo é determinado por um fator denominado “ciclo de trabalho”. Vamos usar uma analogia vívida. É exatamente como o interruptor da torneira que usamos todos os dias. Quanto mais tempo o interruptor estiver ligado, maior será a quantidade de água que sai. No sinal PWM, quanto maior a proporção de nível alto, maior será o ângulo de rotação do servo. Para servos padrão, o ciclo é geralmente definido para 20 milissegundos, e o tempo de alto nível está entre 0,5 milissegundos e 2,5 milissegundos, o que corresponde à faixa de ângulo de 0 graus a 180 graus. Ao usar bibliotecas Raspberry Pi, como RPi.GPIO ou outras mais avançadas, você precisa converter esses tempos em valores de ciclo de trabalho. Embora todo o processo pareça um pouco complicado, felizmente, as funções da biblioteca geralmente foram encapsuladas para você e você só precisa fornecer diretamente o ângulo desejado.
No entanto, mesmo que as funções da biblioteca tenham sido encapsuladas, ainda existem alguns detalhes dignos de nota durante a operação real. Por exemplo, diferentes modelos de servos podem ter pequenas diferenças nos parâmetros, o que exige que você verifique cuidadosamente a documentação relevante antes de usar para garantir que os parâmetros definidos correspondam aos servos reais. Além disso, ao escrever código, preste atenção à estrutura lógica clara do código, e cada etapa deve ser rigorosa e precisa. Embora as funções da biblioteca simplifiquem muitas operações, se a lógica do código for confusa, ainda poderá fazer com que o servo não gire conforme o esperado. Ao mesmo tempo, durante o processo de depuração, devemos ser bons no uso de várias ferramentas de depuração para descobrir e resolver prontamente possíveis problemas, como erros de configuração de tempo de alto nível, erros de cálculo do ciclo de trabalho, etc. Somente considerando cada aspecto de forma abrangente e meticulosa podemos garantir que o servo possa girar com precisão de acordo com suas instruções e alcançar com sucesso as funções que você espera.
Se você deixar o servo pular diretamente de 0 graus para 180 graus, ele retornará repentinamente como se estivesse assustado. Isso não apenas tornará o movimento rígido, mas também danificará facilmente a engrenagem do servo. Se você quiser que os movimentos fiquem bonitos, você tem que usar a ideia de “gradiente”. ️ 1. Primeiro defina um ângulo inicial e um ângulo alvo. ‼️ 2. Calcule quantos passos são necessários no meio. ️ 3. Gire apenas um pouco em cada etapa e adicione um pequeno atraso no meio. Por exemplo, se você escrever um loop que aumenta 1 grau a cada vez e atrasa 20 milissegundos, o servo se moverá suavemente como um braço real. Este método é particularmente prático ao fazer robôs andarem ou agarrarem os braços do robô, e o efeito visual é instantaneamente melhorado em vários níveis.
Depois de trabalhar tanto para escrever o programa, o servo está tremendo como palha. Esta situação provavelmente se deve a um problema na fonte de alimentação. Primeiro, verifique se a fonte de alimentação está estável. Use um multímetro para medir a tensão. Se a flutuação for grande, adicione um capacitor para filtrá-la. Em segundo lugar, pode ser que o próprio sinal PWM seja instável e o PWM simulado pelo software seja facilmente perturbado quando o Raspberry Pi está executando multitarefa. A solução é usar pinos PWM de hardware ou atualizar a biblioteca. Esta biblioteca usa tecnologia DMA (acesso direto à memória) e a precisão do sinal será muito maior. Também é possível que a linha de sinal seja muito longa e esteja sujeita a interferências. Tente usar uma linha DuPont mais curta ou coloque um pequeno resistor na linha de sinal.
Vendo isso, você deve estar confiante em controlar o servo com Raspberry Pi. Estou bastante curioso, em quais projetos interessantes você planeja usar essa habilidade? É um braço robótico para agarrar coisas ou é um pequeno robô que balança a cabeça? Venha para a área de comentários para conversar sobre seus pensamentos. Se você achar este artigo útil, lembre-se de curtir e compartilhar com mais amigos, para que mais pessoas possam se juntar à família maker.
Hora de atualização: 08/03/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.






















