


























SUPPORTO TECNICO


Pubblicato 2026-02-25
Quando si gioca con ilservo, hai mai riscontrato questo imbarazzo: anche se il programma è scritto, ilservocontinua a tremare o il movimento è bloccato come un PPT? In realtà, ciò è probabilmente dovuto al fatto che i tempi non sono corretti. Soprattutto quando si utilizza un USB a 6 canaliservocontroller come Micro, comprendere il suo ritmo di "impulso" è più importante di quale servo scegli. Oggi parleremo di come rendere questa cosa fluida e far avanzare il tuo progetto senza intoppi.
La velocità di rotazione della scatola dello sterzo è, per dirla senza mezzi termini, la velocità di variazione dell'ampiezza dell'impulso del segnale di controllo. Micro ci consente di ottimizzare il tempo necessario affinché ciascun canale passi dall'angolo corrente all'angolo target tramite script o istruzioni. Ad esempio, se desideri che il braccio robotico si sollevi con grazia entro 2 secondi invece di espellersi entro 0,1 secondi, devi impostare il parametro "velocità" o "tempo" nel comando. Il suo interno ti aiuterà a calcolare quanti impulsi di transizione devono essere inviati al centro per ottenere un movimento fluido. Nell'uso reale, puoi prima testarlo manualmente per trovare la durata dell'esercizio appropriata, quindi scriverla nel codice.
Se il servo trema, non incolpare la qualità del servo. Molte volte, il jitter si verifica perché la frequenza di aggiornamento del segnale di controllo non corrisponde al circuito interno del servo, oppure l'alimentazione è insufficiente. Sebbene Micro abbia potenti capacità di stabilizzazione della tensione e di elaborazione del segnale, se l'ondulazione dell'alimentazione è troppo grande o se si guidano più servi a coppia elevata contemporaneamente e la tensione viene abbassata, il chip di controllo all'interno dei servi "attirerà vento", che apparirà come tremolio avanti e indietro. Inoltre, se la linea del segnale viene avvicinata da forti fonti di interferenza come i motori, è facile che venga introdotto del rumore. Controllare innanzitutto l'alimentazione e utilizzare un multimetro per misurare la tensione dinamica. Molte volte il problema è risolto.
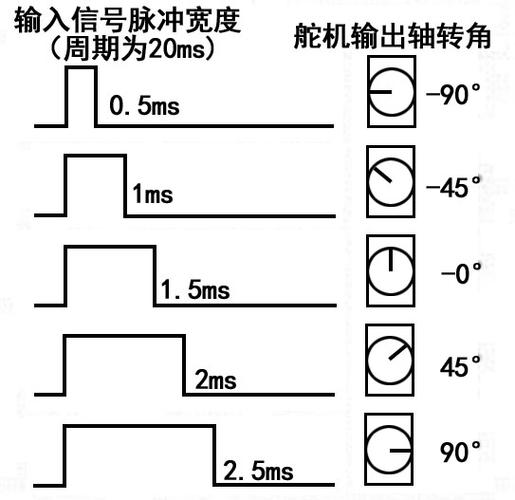
Per impostazione predefinita, la gamma degli impulsi del servo di Micro è solitamente impostata su un valore compreso tra 1000 µs e 2000 µs, che corrisponde a 0-180 gradi. Tuttavia, nel funzionamento reale, molti servi domestici possono avere un intervallo di corsa più ampio, da 500 µs a 2500 µs, e possono persino ruotare di oltre 200 gradi.
Se si scopre che il servo non può ruotare all'angolo specificato o rimane bloccato a metà della rotazione, è necessario calibrare l'ampiezza dell'impulso minima e massima di ciascun canale nel software. Questa operazione non è complicata. Devi solo selezionare il canale, far scorrere manualmente il cursore, osservare attentamente il limite di rotazione effettivo del servo, quindi inserire il valore corrispondente. In questo modo è possibile proteggere efficacemente la scatola dello sterzo da eventuali danni e sfruttare appieno il suo potenziale.
Quando si utilizza la porta USB-seriale per il controllo, l'errore più comune è la mancata corrispondenza della velocità di trasmissione. Nel software il baud rate predefinito è 9600. Tuttavia, se lo si scrive nel codice, la comunicazione sicuramente non sarà possibile. Inoltre, c’è anche la questione del formato delle istruzioni. Il protocollo compatto utilizzato presenta requisiti estremamente severi per la verifica dei dati. Anche se si tratta solo di un errore di trasmissione di byte, verrà ignorato direttamente. Si consiglia di utilizzare prima il software di test ufficiale per inviare comandi semplici. Se il dispositivo può funzionare normalmente, controlla attentamente il codice che hai scritto tu stesso. Inoltre, non dimenticare il ritardo che si verifica quando si passa da un ricetrasmettitore all'altro durante la comunicazione half-duplex. Sebbene questa situazione venga gestita molto rapidamente, l'aggiunta di qualche millisecondo di ritardo renderà la comunicazione più stabile quando le istruzioni vengono inviate continuamente ad alta frequenza.
Allo stesso tempo, ci sono altri aspetti a cui bisogna prestare attenzione. Quando si collega un dispositivo da USB a seriale, assicurarsi che l'interfaccia sia stabile e non allentata, altrimenti la stabilità della trasmissione dei dati potrebbe essere compromessa. Inoltre, diversi sistemi operativi possono avere compatibilità diversa, quindi durante il processo di debug è necessario tenere pienamente conto della versione del sistema operativo. Se riscontri una comunicazione instabile, oltre a controllare la velocità di trasmissione, il formato dei comandi, il ritardo e altri problemi comuni, puoi anche provare a cambiare l'interfaccia USB o riavviare il computer per eliminare alcuni potenziali fattori di interferenza e garantire un controllo stabile e accurato in vari ambienti.
Se vuoi ottenere azioni coordinate di 6 servi contemporaneamente, invece di agire uno per uno, la chiave è utilizzare la funzione "script". Puoi scrivere attentamente uno script qui, impostare attentamente la posizione target e il tempo di movimento di ciascun canale, quindi lasciare che il controller esegua lo script in modo indipendente, senza più fare affidamento sul computer per inviare comandi in tempo reale. In questo modo, anche se il computer si blocca, il braccio robotico può comunque completare senza problemi una serie di azioni combinate.
Se il controllo in tempo reale viene effettuato tramite il computer host, è necessario abilitare il "comando simultaneo multicanale" per impacchettare e inviare gli angoli target di tutti i canali contemporaneamente per evitare la desincronizzazione causata da ritardi di rete.
Se il servo è bloccato, è probabile che tu abbia fame. Ogni servo può consumare diversi ampere di corrente quando è bloccato. Se ne lavorano 6 insieme, la corrente istantanea può facilmente superare i 20A. Se utilizzi solo l'alimentatore USB, non solo non sarà in grado di trasportarlo, ma potrebbe anche bruciare la scheda madre del computer. L'approccio corretto è fornire un'alimentazione separata, collegare il cavo di alimentazione del servo direttamente a una batteria o a un alimentatore switching con potenza sufficiente e consentire la ricezione del segnale solo tramite USB. Si noti che il filo di terra dell'alimentatore e il filo di terra del computer devono essere collegati alla stessa terra, altrimenti il segnale fluttuerà in modo casuale. Con l'alimentatore in funzione, la maggior parte dei problemi e dei tremolii può essere risolta.
Vedendo questo, ti rendi conto che il controllo dello sterzo non è così misterioso? In effetti, molti problemi risiedono nei dettagli. Qual è il problema allo sterzo più difficile che tu abbia mai riscontrato mentre lavoravi a un progetto? Benvenuto per condividere la tua "storia di sangue e lacrime" nell'area commenti, ed evitiamo insieme le trappole. Se trovi utile questo articolo, non dimenticare di mettere mi piace e di inoltrarlo in modo che più amici che giocano ai servi possano vederlo!
Tempo di aggiornamento: 25-02-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.






















