


























기술 지원


게시됨 2026-04-01
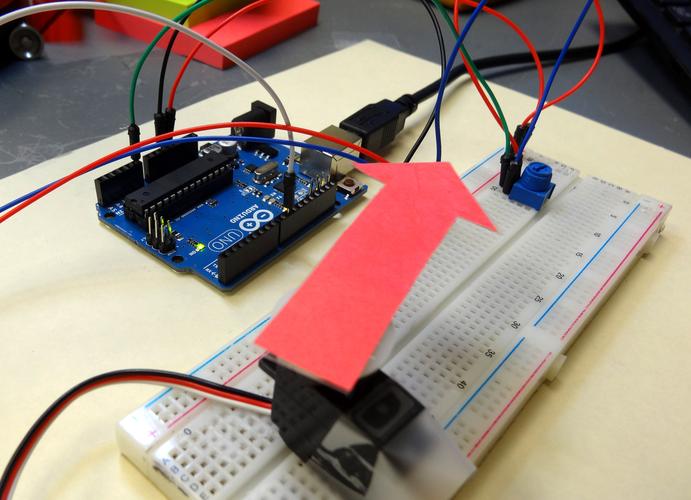
어떻게 해야 하나요?서보 기구모터를 보드로
그만큼서보 기구의 전선을 PWM 핀, 핀 9 또는 10에 연결합니다.서보 기구사용. 전원선을5V작은 서보를 사용하는 경우 핀을 사용하고, 장치의 경우5V ~ 6V보드 밖으로 나가는 것을 방지하는 힘. , 서보 및 전원 이어야 합니다.
내가 어떤 힘을 사용하는지
절대로 하나 이상의 서보에 전원을 공급하지 마십시오.5V핀; . 사용5V ~ 6VBEC 또는 등급 이상서보당 1A. 모든 전선과 서보 전원의 레일은 에만 연결되고 에는 연결되지 않습니다.5V핀.
서보를 스윕하는 코드는 무엇입니까?
서보# . 서보서보 ;, 그런 다음설정()그것을 사용하여 핀에.(9);. 사용.write(각도);from이 포함된 루프0에게180그리고15ms스윕 속도까지 단계를 지연시킵니다.
어떻게 봉사하나요?
회선의 전원이나 노이즈로 인해 발생합니다. 전력은 부하가 걸릴 수 있으며 큰 값을 추가할 수 있습니다(100~1000μF) 서보에 가까운 전원 및 레일. 오랫동안 사용하려면470Ω라인에 와이어를 와이어로 꼬아줍니다.
내 서보가 각도에 도달하지 못하는 이유는 무엇입니까?
또는 가득 차있을 수 있습니다. 먼저 부하가 걸린 전력을 확인하십시오. 아래로 떨어진다4.8V원인이 됩니다. 전원이 공급되면 모터에 대한 서보 혼이 부하를 이동시키고 펄스 폭 범위는 다음을 사용합니다..(최소, 최대)서보가 아닌 경우500μs에게2500μs .
서보에서 어떻게 읽을 수 있나요?
다음을 사용하여 입력 읽기int = (A0);그런 다음 매핑0-1023범위0-180사용하여int angle = map(, 0, 1023, 0, 180);. 다음을 사용하여 서보에 각도를 씁니다..write(각도);각 루프에서 . 단편 추가15ms빠른 속도로 서보를 지연시킵니다.
에 서보를 장착할 때 가장 먼저 무엇을 했고, 전력 문제를 어떻게 해결했나요?
업데이트 시간:2026-04-01






















