


























ASSISTANCE TECHNIQUE


Publié 2026-02-25
En jouant avec leservomoteur, avez-vous déjà rencontré cet embarras : même si le programme est écrit, leservomoteurcontinue de trembler, ou le mouvement est bloqué comme un PPT ? En fait, c’est probablement parce que le timing n’est pas correct. Surtout lorsque vous utilisez un port USB à 6 canauxservomoteurcontrôleur comme Micro, comprendre son rythme "d'impulsion" est plus important que le servo que vous choisissez. Aujourd'hui, nous allons parler de la façon de faciliter les choses et de faire avancer votre projet en douceur.
La vitesse de rotation de l'appareil à gouverner est, pour parler franchement, le taux de variation de la largeur d'impulsion du signal de commande. Micro nous permet d'affiner le temps nécessaire à chaque canal pour passer de l'angle actuel à l'angle cible via des scripts ou des instructions. Par exemple, si vous souhaitez que le bras robotique se lève gracieusement en 2 secondes au lieu de s'éjecter en 0,1 seconde, vous devez définir le paramètre « vitesse » ou « temps » dans la commande. Son intérieur vous aidera à calculer combien d'impulsions de transition doivent être envoyées au milieu pour obtenir un mouvement fluide. En utilisation réelle, vous pouvez d'abord le tester manuellement pour trouver la durée d'exercice appropriée, puis l'écrire dans le code.
Si le servo tremble, ne blâmez pas la qualité du servo. Plusieurs fois, une gigue se produit parce que la fréquence de mise à jour du signal de commande ne correspond pas au circuit interne du servo ou que l'alimentation électrique est insuffisante. Bien que Micro dispose de puissantes capacités de stabilisation de tension et de traitement du signal, si l'ondulation de votre alimentation est trop importante ou si vous pilotez plusieurs servos à couple élevé en même temps et que la tension est abaissée, la puce de contrôle à l'intérieur des servos « attirera le vent », ce qui apparaîtra comme une instabilité d'avant en arrière. De plus, si la ligne de signal est approchée par de fortes sources d'interférences telles que des moteurs, du bruit peut facilement être introduit. Vérifiez d’abord l’alimentation électrique et utilisez un multimètre pour mesurer la tension dynamique. Plusieurs fois, le problème est résolu.
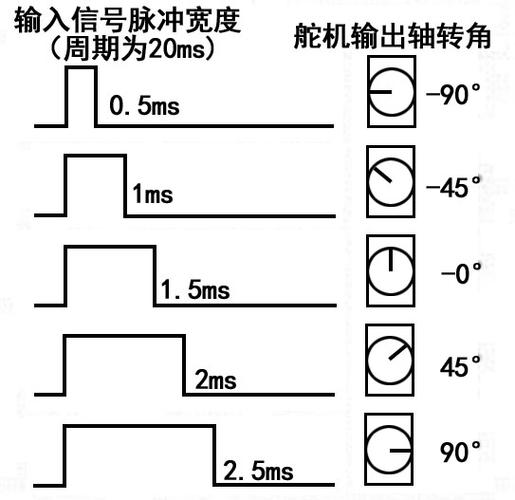
Par défaut, la plage d'impulsions du servo du Micro est généralement réglée entre 1 000 µs et 2 000 µs, ce qui correspond à 0 à 180 degrés. Cependant, en fonctionnement réel, de nombreux servos domestiques peuvent avoir une plage de course plus large, de 500 µs à 2 500 µs, et peuvent même tourner à plus de 200 degrés.
Si vous constatez que le servo ne peut pas tourner à l'angle spécifié ou qu'il reste bloqué à mi-chemin de la rotation, il est alors nécessaire de calibrer la largeur d'impulsion minimale et maximale de chaque canal dans le logiciel. Cette opération n'est pas compliquée. Il vous suffit de sélectionner le canal, de faire glisser le curseur manuellement, d'observer attentivement la limite de rotation réelle du servo, puis de remplir la valeur correspondante. De cette manière, l'appareil à gouverner peut être efficacement protégé contre les dommages et tout son potentiel peut être pleinement utilisé.
Lors de l'utilisation du port USB vers le port série pour le contrôle, l'erreur la plus courante est l'inadéquation du débit en bauds. Dans le logiciel, le débit en bauds par défaut est de 9600. Cependant, si vous l'écrivez dans le code, la communication ne sera certainement pas possible. À cela s’ajoute la question du format des instructions. Le protocole compact utilisé impose des exigences extrêmement strictes en matière de vérification des données. Même s'il ne s'agit que d'une erreur de transmission d'octets, elle sera directement ignorée. Il est recommandé d'utiliser d'abord le logiciel de test officiel pour envoyer des commandes simples. Si l'appareil peut fonctionner normalement, vérifiez soigneusement le code que vous avez écrit vous-même. De plus, n’oubliez pas le délai qui se produit lors du basculement entre émetteurs-récepteurs et émetteurs-récepteurs lors d’une communication semi-duplex. Bien que cette situation soit gérée très rapidement, l’ajout de quelques millisecondes de délai rendra la communication plus stable lorsque les instructions sont envoyées en continu à haute fréquence.
Dans le même temps, il y a d’autres aspects auxquels il faut prêter attention. Lors de la connexion d'un périphérique USB vers série, assurez-vous que l'interface est stable et non lâche, sinon la stabilité de la transmission des données pourrait être affectée. De plus, différents systèmes d'exploitation peuvent avoir une compatibilité différente, donc lors du processus de débogage, la version du système d'exploitation doit être pleinement prise en compte. Si vous rencontrez une communication instable, en plus de vérifier le débit en bauds, le format de commande, le délai et d'autres problèmes courants, vous pouvez également essayer de modifier l'interface USB ou de redémarrer l'ordinateur pour éliminer certains facteurs d'interférence potentiels et assurer un contrôle stable et précis dans divers environnements.
Si vous souhaitez réaliser des actions coordonnées de 6 servos en même temps, au lieu d'agir un par un, l'essentiel est d'utiliser la fonction "script". Vous pouvez écrire soigneusement un script ici, définir soigneusement la position cible et le temps de mouvement de chaque canal, puis laisser le contrôleur exécuter le script indépendamment, sans plus compter sur l'ordinateur pour envoyer des commandes en temps réel. De cette façon, même si l’ordinateur se bloque, le bras robotique peut toujours effectuer en douceur un ensemble d’actions combinées.
Si le contrôle en temps réel est effectué via l'ordinateur hôte, il est nécessaire d'activer la « commande simultanée multicanal » pour regrouper et envoyer les angles cibles de tous les canaux en même temps pour éviter la désynchronisation causée par les retards du réseau.
Si le servo est bloqué, il y a de fortes chances que vous ayez faim. Chaque servo peut consommer plusieurs ampères de courant lorsqu'il est verrouillé. Si 6 d’entre eux fonctionnent ensemble, le courant instantané peut facilement dépasser 20A. Si vous utilisez uniquement une alimentation USB, non seulement elle ne pourra pas la transporter, mais elle risque également de brûler la carte mère de l'ordinateur. L'approche correcte consiste à fournir une alimentation séparée, à connecter le cordon d'alimentation du servo directement à une batterie ou à une alimentation à découpage avec une puissance suffisante et à autoriser uniquement la réception du signal via USB. Notez que le fil de terre de l'alimentation et le fil de terre de l'ordinateur doivent être connectés à la même masse, sinon le signal flottera de manière aléatoire. Avec l’alimentation électrique en place, la plupart des bégaiements et des tremblements peuvent être résolus.
En voyant cela, vous rendez-vous compte que la commande de l’appareil à gouverner n’est pas si mystérieuse ? En fait, de nombreux problèmes résident dans les détails. Quel est le problème d’appareil à gouverner le plus difficile que vous ayez jamais rencontré en travaillant sur un projet ? Bienvenue à partager votre « histoire de sang et de larmes » dans la zone de commentaires, et évitons ensemble les pièges. Si vous trouvez cet article utile, n’oubliez pas de l’aimer et de le transmettre afin que davantage d’amis qui jouent aux servos puissent le voir !
Heure de mise à jour:2026-02-25
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.






















