


























ASSISTANCE TECHNIQUE


Publié 2026-02-15
Avez-vous déjà rencontré cette situation : vous souhaitez queservomoteurd'ajuster automatiquement la vitesse en fonction de la distance, mais vous trouvez que soit elle tourne trop lentement pour n'avoir aucun effet, soit elle tourne trop vite comme une convulsion ? Lorsque vous utilisez des ondes ultrasonores pour contrôler unservomoteur, quelle vitesse faut-il lui mettre ? C'est en effet un casse-tête. Aujourd'hui, en tant que fabricant bricolant du matériel intelligent depuis de nombreuses années, je vais vous parler de ce sujet et partager quelques expériences réelles.
Nous devons d’abord comprendre une chose : comment le capteur à ultrasons et l’appareil à gouverner fonctionnent ensemble. Pour faire simple, le module à ultrasons est comme vos yeux, qui indiquent au contrôleur à quelle distance se trouve l'objet devant ; et leservomoteurest comme votre main, qui doit réagir en fonction des informations vues par les yeux. Si vous souhaitez que la vitesse du servo s'ajuste à mesure que la distance change, la clé est d'établir une relation de cartographie. Par exemple, lorsque la distance de l'objet est inférieure à 20 cm, la vitesse de rotation peut être plus lente ; lorsque la distance est comprise entre 20 et 50 cm, la vitesse de rotation est moyenne ; lorsque la distance dépasse 50 cm, la vitesse de rotation est la plus rapide. Cette logique semble simple, mais il y a beaucoup de choses à prendre en compte lors du réglage des paramètres, qui sont directement liés à l'effet final.
Pour être honnête, il n’existe pas de réponse standard à cette question. Cela dépend principalement du scénario dans lequel vous l'utilisez. S'il s'agit d'une poubelle intelligente, la vitesse d'ouverture et de fermeture du couvercle est trop rapide et peut effrayer les gens, donc 30 à 45 degrés par seconde sont tout à fait appropriés ; s'il s'agit d'une caméra de suivi automatique, la vitesse doit être plus rapide, de 60 à 90 degrés par seconde, pour suivre les objets en mouvement. J'ai vu de nombreux novices régler la vitesse maximale dès le démarrage. En conséquence, le servo émet un bruit de cliquetis et est sujet à une surchauffe. Il est recommandé, en fonction des besoins réels, de tester d'abord à basse vitesse, puis de l'augmenter lentement pour trouver le point « juste ».
Pour obtenir une vitesse réglable, le plus important est de gérer le retard ou la minuterie dans le code. Si utilisé, vous pouvez faire ceci : lisez d'abord la valeur de distance renvoyée par le module à ultrasons, puis utilisez la fonction map pour mapper cette valeur à la plage de vitesse souhaitée. Par exemple, la distance de 0 à 100 centimètres correspond à la vitesse de rotation de 0 à 90 degrés par seconde. Ensuite, dans la boucle, calculez combien de temps chaque étape doit être retardée en fonction de cette vitesse. Voici une petite astuce : utilisez directement la minuterie () au lieu du délai, afin que le servo puisse continuer à détecter la distance pendant que le servo tourne, et que la réponse soit plus sensible.
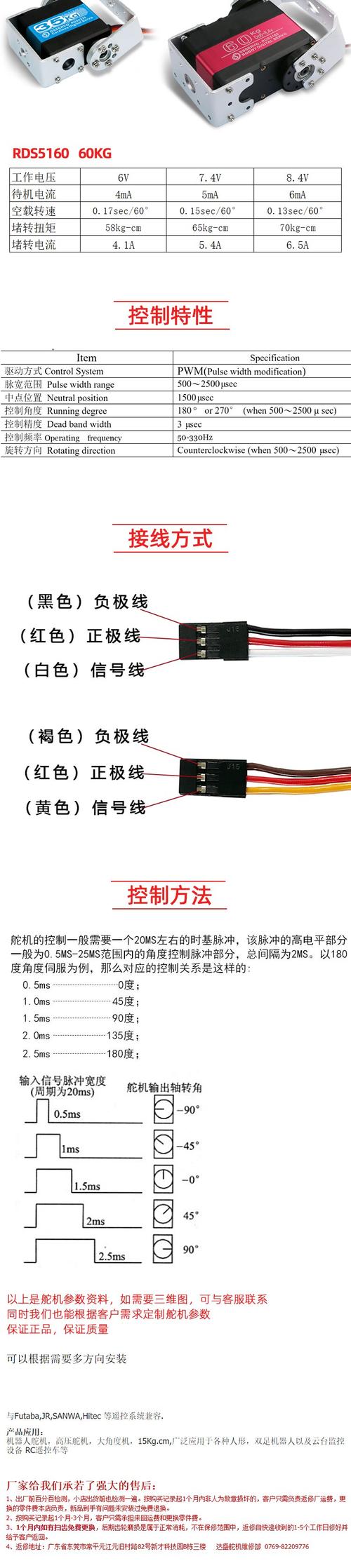
Il existe différents servos sur le marché, les plus courants sont les servos analogiques et les servos numériques. Les servos analogiques reçoivent des ondes PWM, et leur vitesse est relativement stable, mais leur plage de réglage est limitée ; les servos numériques réagissent rapidement et prennent en charge un contrôle de vitesse plus précis, mais sont bien sûr plus chers. Il existe également des différences entre les engrenages en métal et les engrenages en plastique. Si vous souhaitez que le servo fonctionne à une certaine vitesse pendant une longue période, il est recommandé de choisir des engrenages métalliques, qui ont une bien meilleure dissipation de la chaleur et une meilleure durabilité. Lors du choix d'un servo, n'oubliez pas de regarder l'item "vitesse à vide" du tableau des paramètres, qui est sa vitesse ultime.
Vous ne pensez peut-être pas que l’endroit où le capteur à ultrasons est installé affectera également la vitesse que vous définirez finalement. S'il est installé trop haut, les objets bas risquent de ne pas être détectés ; s'il est installé trop loin, la portée de détection sera limitée. Je vous suggère d'installer le capteur et le servo au même niveau afin que l'espace qu'ils voient et bougent soit cohérent. Un autre point important est d'éviter de placer le capteur contre un mur lisse ou une surface incurvée, ce qui pourrait provoquer une réflexion diffuse et conduire à des lectures inexactes. Si la lecture est inexacte, la vitesse du servo fluctue rapidement et lentement, ce qui sera une expérience terrible.
Sur la base des pièges sur lesquels j'ai marché, je voudrais vous le rappeler : le premier est le problème des interférences. Lorsque l'onde ultrasonique et l'appareil à gouverner partagent l'alimentation électrique, il est facile de s'influencer mutuellement et les lectures sautent de manière aléatoire lorsque l'appareil à gouverner tourne. La solution consiste à utiliser une alimentation séparée ou à échelonner les temps de travail dans le programme. Le deuxième est le délai de réponse. Lorsqu'un objet se déplace rapidement, si la vitesse de rotation ne peut pas suivre, le servo apparaîtra très lent. À ce stade, la fréquence d'échantillonnage peut être augmentée de manière appropriée ou une fonction de prédiction peut être ajoutée à l'algorithme. Le dernier est la protection contre les surcharges. Garder le servo à haute vitesse pendant une longue période peut facilement griller. N'oubliez pas d'ajouter une logique d'arrêt de délai d'attente dans le code.
Après avoir lu ceci, vous devriez avoir une idée sur la façon de régler la vitesse, n'est-ce pas ? Mais je veux aussi vous demander : dans le débogage réel, pensez-vous que la chose la plus gênante est le problème de correspondance de vitesse ou les données instables du capteur ? N'hésitez pas à partager votre expérience dans la zone de commentaires et à lui donner un like afin que davantage d'amis créateurs puissent voir cet article !
Heure de mise à jour:2026-02-15
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.




















