


























ASSISTANCE TECHNIQUE


Publié 2026-02-16
Récemment, un ami bricolait une petite invention et souhaitait appliquer la méthode de télécommande infrarouge auservomoteurcontrôle, mais a constaté que soit leservomoteurtourné au hasard ou n'a tout simplement pas répondu. Je crois que de nombreux amis qui débutent ont rencontré des situations similaires. Ils souhaitent mettre en œuvre un contrôle sans fil, mais sont bloqués par un tas de détails techniques. En fait, en utilisantun capteur infrarouge pour contrôler leservomoteurest essentiellement de faire comprendre au servo les "mots" de la télécommande. Cette question n'est pas aussi compliquée qu'on l'imagine. Clarifions-le étape par étape.
Pour que le servo obéisse docilement, l'essentiel est d'établir la relation correspondante entre le signal infrarouge et l'angle du servo. Le code infrarouge émis par la télécommande est unique lorsque chaque bouton est enfoncé. Notre tâche est de laisser le microcontrôleur capturer ce code puis de le traduire en instructions que le servo peut comprendre. Ce processus revient à attribuer une mission spécifique à chaque bouton de la télécommande, comme appuyer sur "Volume +" pour faire pivoter le servo de 30 degrés.
En pratique, nous pouvons mettre en œuvre ce processus de traduction par programmation. Lorsque le récepteur infrarouge détecte le signal, le microcontrôleur le décode immédiatement et interroge la table de programme que nous avons définie à l'avance. Une fois qu'un code correspondant est trouvé, l'onde PWM correspondante est immédiatement envoyée au servo pour le faire tourner à l'angle spécifié. C'est comme équiper le servo d'une paire d'oreilles capables de comprendre les commandes infrarouges.
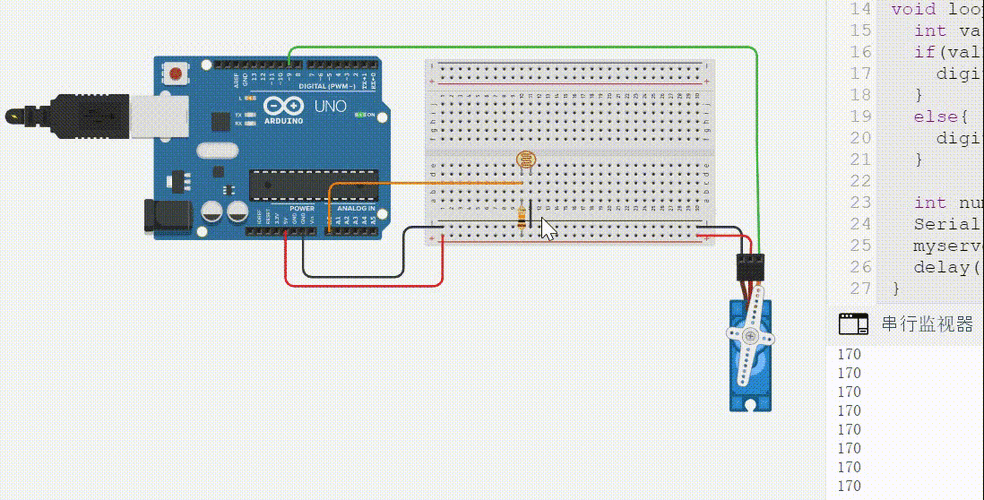
La connexion matérielle est la base de l’ensemble du système. Si vous le connectez mal, cela provoquera de la fumée. Tout d’abord, il faut distinguer les trois broches du récepteur infrarouge. Habituellement, VCC est connecté au pôle positif de l'alimentation, GND est connecté à la terre et la broche OUT est connectée à une broche d'interruption du microcontrôleur ou à un port E/S ordinaire. Cette broche OUT est chargée de transmettre le signal infrarouge reçu au cerveau du microcontrôleur.
La connexion du servo est relativement fixe. Il comporte trois fils, le marron ou le noir est le fil de terre, le rouge est le fil d'alimentation et l'orange ou le jaune est le fil de signal. Connectez la ligne de signal à la broche de sortie PWM du microcontrôleur. Notez que si la puissance du servo est importante, il est préférable de l'alimenter séparément. Ne tirez pas d'alimentation directement du microcontrôleur, sinon la carte mère pourrait être facilement brûlée. Connectez les fils de terre publics ensemble afin que le signal puisse être transmis normalement.
Il existe différents récepteurs infrarouges et télécommandes sur le marché, et choisir le mauvais rendra le débogage plus difficile. Pour les amis novices, il est recommandé de choisir directement un récepteur infrarouge avec une fréquence porteuse de 38 kHz. Par exemple, il s’agit actuellement du modèle le plus polyvalent et convient à la plupart des télécommandes d’appareils électroménagers. En ce qui concerne la télécommande, trouvez simplement une télécommande de téléviseur ou de décodeur inactif à la maison. Il n'est pas nécessaire d'en acheter un nouveau.
Si vous souhaitez acheter votre propre télécommande, vous pouvez choisir une petite télécommande avec protocole NEC. Le décodage de ce protocole est relativement simple et la plupart des codes prêts à l'emploi peuvent être trouvés en ligne. Essayez d'éviter de choisir des télécommandes avec certains protocoles impopulaires, sinon le processus de décodage vous donnera mal à la tête. N'oubliez pas que choisir le bon matériel représente la moitié de la réussite de votre projet.
Le code est l’âme de la logique de contrôle, mais n’ayez crainte, de nombreux codes de base peuvent être trouvés en ligne. Nous utilisons d'abord les fonctions de la bibliothèque pour simplifier le processus, comme l'utilisation de la bibliothèque pour gérer la réception infrarouge et l'utilisation de la bibliothèque Servo pour contrôler le servo. Lors de l'initialisation, définissez d'abord la broche de réception infrarouge et la broche du servo, puis réglez l'angle initial du servo.
Dans la fonction de boucle, nous laissons le microcontrôleur détecter en permanence si un signal infrarouge entre. Une fois qu'il y a un signal, lisez sa valeur, puis utilisez l'instruction ou si pour porter un jugement. Si la valeur concerne une touche spécifique, laissez le servo aller à 30 degrés ; si c'est une autre clé, laissez-la aller à 90 degrés. Après avoir écrit le code, téléchargez-le sur le microcontrôleur et testez-le avec la télécommande.
Lorsque vous appuyez sur la télécommande avec de grandes attentes, pour constater que le servo tremble ou est lent à répondre, ne doutez pas de votre vie pressée. La cause la plus fréquente des vibrations des servos est une alimentation électrique insuffisante. Surtout lorsque le servo nécessite un couple important pour tourner, le courant instantané abaissera la tension, provoquant la réinitialisation du microcontrôleur. Essayez d'alimenter le servo séparément ou de connecter un gros condensateur en parallèle aux deux extrémités de l'alimentation pour stabiliser la tension.
Une autre cause fréquente est l’interférence du signal infrarouge. S'il y a des lumières fortes ou d'autres appareils infrarouges à proximité, la réception peut être affectée. Assurez-vous que le récepteur infrarouge n'est pas bloqué et que la télécommande lui fait face. Certains traitements anti-rebond peuvent également être ajoutés au code, comme un léger délai avant l'exécution après détection du signal, afin d'éliminer la possibilité de faux déclenchements.
Après avoir contrôlé un servo avec un seul bouton, vous aurez certainement envie de jouer à quelque chose de plus complexe. Par exemple, utilisez une télécommande pour contrôler plusieurs servos ou obtenez une régulation de vitesse en continu. Ce n’est en fait pas difficile. Nous pouvons utiliser différents boutons de la télécommande pour contrôler différents servos. Par exemple, le bouton 1 contrôle le servo A et le bouton 2 contrôle le servo B. Ils n'interfèrent pas les uns avec les autres et chacun remplit ses fonctions.
Si vous souhaitez contrôler la rotation du servo en continu, vous pouvez définir deux touches, une pour augmenter l'angle et une pour diminuer l'angle. Chaque fois qu'une touche est enfoncée, l'angle change de 5 ou 10 degrés, permettant un réglage précis. Vous pouvez même concevoir un programme qui permet au servo d'exécuter automatiquement un ensemble de procédures d'action prédéfinies après avoir reçu une séquence spécifique de touches, rendant ainsi un simple gadget instantanément intelligent.
En voyant cela, vous avez déjà des démangeaisons et souhaitez l'essayer tout de suite ? En fait, cette méthode de jeu est particulièrement adaptée à la modification de voitures intelligentes, de têtes de caméra ou de bras robotiques. Je voudrais demander à tout le monde, dans votre projet créatif, quel genre d'action intéressante souhaitez-vous le plus utiliser la télécommande infrarouge pour contrôler le servo ? N'hésitez pas à laisser un message dans la zone de commentaires pour partager vos merveilleuses idées. Si vous trouvez cet article utile, n’oubliez pas de l’aimer et de le partager avec d’autres amis qui en ont besoin !
Heure de mise à jour:2026-02-16
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.




















