


























ASSISTANCE TECHNIQUE


Publié 2026-02-26
Je crois que de nombreux amis ont rencontré ce problème en bricolant des robots ou des gadgets de bricolage : leservomoteura été acheté et connecté au secteur, mais il n'a tout simplement pas bougé, ou il n'a tourné bêtement que dans une direction. Vous voulez qu’il bouge avec souplesse comme un cou humain et qu’il pilote une caméra ou un petit pointeur laser pour frapper où vous voulez, mais vous ne savez pas par où commencer. Ne vous inquiétez pas, en fait, faire leservomoteurL'obéissance du cardan n'est pas aussi compliqué que vous le pensez. Aujourd'hui, parlons de la façon de contrôler la rotation de ceservomoteurcardan.
Pour parler franchement, un cardan à deux axes peut se déplacer vers le haut, le bas, la gauche et la droite, en s'appuyant sur deux servos pour accomplir leurs tâches respectives. Un tube est dans la direction horizontale, ce que nous appelons souvent rotation à gauche et à droite, et le terme est « cap » ou « translation » ; l'autre tube est dans le sens vertical, c'est-à-dire que lorsque vous levez et baissez la tête, le terme est « pitch ». Vous devez d'abord réparer les deux servos et construire la structure mécanique du cardan afin qu'ils puissent être responsables d'une direction sans interférer l'un avec l'autre. C'est comme un cou humain. Il doit pouvoir tourner la tête à gauche et à droite et hocher la tête. Cela s’appuie également sur différents groupes musculaires. Par conséquent, la première étape pour contrôler la rotation consiste d’abord à déterminer dans quelle direction vous souhaitez que le cardan se déplace, ce qui correspond au servo qui fonctionne.
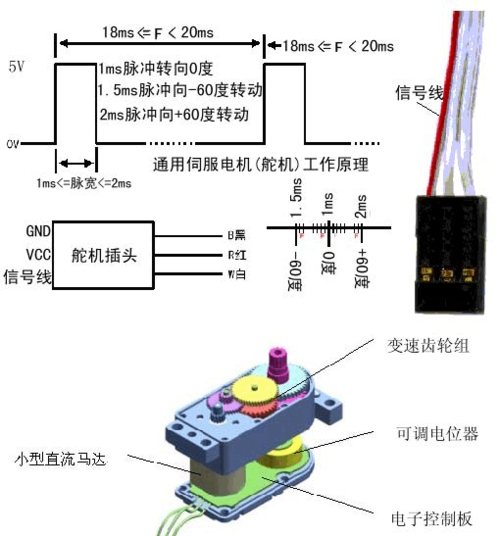
De nombreux novices sont confus lorsqu'ils voient les mots « signal de commande » et « PWM » et estiment qu'ils sont très avancés. En fait, c'est très simple. Vous pouvez considérer cela comme l'envoi d'une "commande temporelle" au servo. La position de l'axe de l'appareil à gouverner n'est pas déterminée par la tension, mais par une impulsion de haut niveau d'une durée de quelques millisecondes. Généralement, cette impulsion varie entre 1 milliseconde et 2 millisecondes. Envoyez une impulsion de 1 milliseconde et le servo tournera vers l'extrême gauche ; envoyez une impulsion de 1,5 milliseconde et elle se tournera vers le milieu ; envoyez une impulsion de 2 millisecondes et il tournera vers l'extrême droite. Pour que le cardan tourne en continu, cela dépend de votre carte de commande principale (telle que STM32) pour envoyer cette impulsion en continu 50 fois par seconde, et la largeur d'impulsion change légèrement à chaque fois.
Puisque le principe est d’envoyer des impulsions, il est très intuitif de l’implémenter dans le code. Sur une telle plateforme, vous pouvez utiliser directement la « bibliothèque de serveur » toute prête sans avoir à calculer vous-même l'heure. Par exemple, si vous écrivez.écrire(90), il générera automatiquement une impulsion qui pourra faire tourner le servo à la position 90 degrés. Voulez-vous que le cardan effectue lentement un cercle de gauche à droite ? Écrivez une boucle for pour augmenter lentement l'angle de 0 à 180, avec un petit retard au milieu, et le cardan tournera en douceur. Pour ceux qui débutent dans les applications d’appareil à gouverner, c’est certainement le moyen le plus rapide de démarrer. Vous n'avez pas besoin de comprendre comment la couche inférieure génère des impulsions, il vous suffit d'indiquer au servo "quel angle aller".
Si vous souhaitez ressentir plus intuitivement le fait de "frapper là où vous pointez", ce serait une expérience très intéressante d'utiliser un potentiomètre (ce genre de bouton rotatif) pour contrôler directement le cardan. Vous pouvez connecter le potentiomètre à la broche d'entrée analogique du microcontrôleur. Le programme lira en continu la position actuelle du bouton (comme une valeur de 0 à 1023), puis « mappera » cette valeur proportionnellement à la valeur d'angle requise par le servo (comme 0 à 180). Lorsque vous tournez lentement le potentiomètre à la main, le servo du cardan tournera de manière synchrone, comme s'il était relié par une bielle invisible. Cette sensation de retour de contrôle en temps réel vous donnera une compréhension plus profonde du « contrôle ».
Bien entendu, la commande manuelle seule ne suffit pas. Si vous souhaitez que le cardan reste à niveau ou suive automatiquement une cible, vous devez utiliser un capteur d'attitude, par exemple. Vous pouvez installer le capteur sur le cardan et il détectera si le cardan est actuellement incliné en temps réel. Une fois qu'il y a une force externe pour le rendre tordu, le programme lira immédiatement les données d'écart, les calculera rapidement via l'algorithme PID, puis enverra immédiatement une instruction de correction d'angle à l'appareil à gouverner. L'ensemble du processus est terminé en quelques millisecondes, vous donnant le sentiment que peu importe la façon dont vous secouez la base, la caméra sur le cardan restera toujours immobile, aussi stable qu'une montagne. Cette technologie de stabilisation automatique de l’image est largement utilisée dans la photographie aérienne et les stabilisateurs portables.
Je dois vous rappeler un écueil particulièrement facile à tomber, c'est le problème d'alimentation électrique. Lorsque le servo est démarré et chargé, le courant instantané sera très important. Si vous utilisez une alimentation USB de microcontrôleur ordinaire pour le piloter, la tension sera instantanément réduite, provoquant la réinitialisation du microcontrôleur ou la contraction ou la secousse du servo directement. Ne lésinez donc pas sur votre alimentation. Il est préférable de préparer une batterie externe ou un module de stabilisation de tension pour le servo avec une capacité de sortie de courant suffisante, et de connecter les fils de terre d'alimentation du microcontrôleur et du servo ensemble. Ce n'est qu'ainsi que l'ensemble du système pourra fonctionner de manière stable et que tous vos codes et logiques de contrôle précédents pourront être utilisés.
Après avoir vu cela, avez-vous une meilleure idée de la façon de contrôler la rotation du servo et du cardan ? Qu'il s'agisse du simple envoi d'impulsions, de l'utilisation d'un code pour contrôler l'angle ou de l'ajout d'une stabilisation automatique du capteur, chaque étape peut vous rapprocher de votre produit créatif. Vous voulez l'essayer dès maintenant et installer un cou flexible sur votre appareil photo ou votre gadget ? Si vous rencontrez des problèmes lors de la sélection d'un servo ou de la conception d'une structure, vous pouvez également consulter certains forums de robots professionnels ou sites Web officiels d'entreprises, où vous trouverez des solutions prêtes à l'emploi et des produits matures à titre de référence. Après avoir tant parlé, j'étais soudain curieux : pour quels projets intéressants souhaitez-vous utiliser ce cardan servo ? Partagez-le dans la zone de commentaires, donnez-lui un like et laissez davantage d'amis impliqués voir vos idées !
Heure de mise à jour:2026-02-26
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.






















