


























ASSISTANCE TECHNIQUE


Publié 2026-03-08
Récemment, de nombreux amis m'ont demandé s'ils voulaient utiliser le Raspberry Pi pour réaliser quelques petites inventions, mais ils ne savent pas comment réaliser le Raspberry Pi.servomoteurse déplacer. Avez-vous également rencontré ce genre d'embarras - leservomoteurest connecté et le code est saisi, mais il ne bouge tout simplement pas ou tremble comme une convulsion ? Ne vous inquiétez pas, il s’agit en fait d’un obstacle que tout créateur devra franchir. Aujourd'hui, je vais vous guider étape par étape pour briser cet os dur, afin que leservomoteurdans votre main peut se tourner docilement vers l'angle spécifié.
Si vous souhaitez utiliser un Raspberry Pi pour contrôler un servo, vous devez d'abord comprendre comment les deux "parlent". Le servo ne peut pas comprendre les signaux numériques du Raspberry Pi. Il ne reconnaît qu'un signal de forme d'onde appelé PWM (Pulse width Modulation). Pour faire simple, il envoie des impulsions électriques de différentes largeurs au boîtier de direction pour lui dire de « tourner en position médiane » ou de « tourner à l'extrême droite ». Le Raspberry Pi lui-même possède des broches matérielles PWM, mais leur nombre est limité, c'est pourquoi de nombreuses personnes utilisent la simulation logicielle. Il vous suffit de connecter la ligne de signal du servo à la broche GPIO du Raspberry Pi, puis de générer le signal d'impulsion correspondant via la programmation, et le servo pourra comprendre vos instructions.
Il existe une grande variété de servomoteurs sur le marché et choisir le mauvais peut s'avérer difficile. Pour débuter avec le Raspberry Pi, je vous recommande fortement d'utiliser le micro servo SG90 9g ordinaire. Ce petit servo est bon marché et robuste, et la tension requise est exactement celle de 5 V que le Raspberry Pi peut fournir. Si vous souhaitez effectuer un travail difficile, comme contrôler un bras robotique, vous devez alors envisager ce type de servomoteur à couple élevé à engrenages métalliques. Cependant, je voudrais vous rappeler que le courant de fonctionnement important du servo peut être trop important pour le Raspberry Pi, il est donc préférable de l'alimenter séparément. Il y a un autre point qu’il est facile de négliger. Il existe deux types de servos : analogiques et numériques. Pour les débutants, l’analogique suffit. La logique de contrôle est simple et directe.
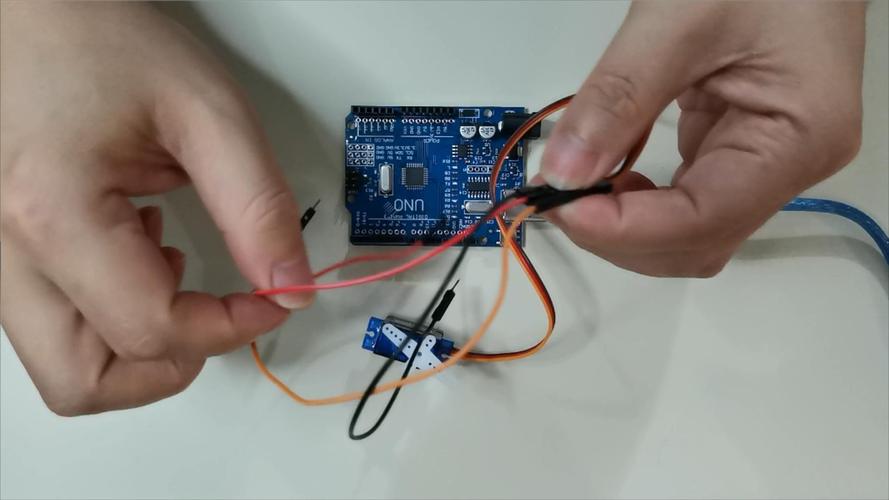
L'étape de câblage semble simple, mais de nombreuses personnes tombent dessus. L’erreur la plus courante consiste à connecter les pôles positif et négatif de manière inversée. Vous pouvez sentir une odeur collante en un instant et le servo sera mis au rebut. N'oubliez pas : le fil rouge va à l'alimentation 5 V, le fil marron ou noir va à la masse et le fil de signal jaune ou orange va à la broche GPIO. Un autre écueil est l’alimentation électrique insuffisante. La broche 5V du Raspberry Pi a un courant de sortie limité. Si plus de deux servos sont utilisés, la tension sera réduite, provoquant le redémarrage du Raspberry Pi. Une approche sûre consiste à utiliser une alimentation externe pour le servo uniquement et à connecter la masse de l'alimentation à la masse du Raspberry Pi afin que le signal puisse être transmis normalement.
Avant de commencer officiellement à écrire du code, vous devez d’abord bien comprendre les secrets de la rotation du servo. L'angle du servo est déterminé par un facteur appelé « rapport cyclique ». Utilisons une analogie frappante. C'est exactement comme l'interrupteur de robinet que nous utilisons tous les jours. Plus l'interrupteur reste allumé longtemps, plus la quantité d'eau qui s'écoule est importante. Dans le signal PWM, plus la proportion de niveau élevé est élevée, plus l'angle de rotation du servo est grand. Pour les servos standard, le cycle est généralement réglé sur 20 millisecondes et le temps de haut niveau est compris entre 0,5 milliseconde et 2,5 millisecondes, ce qui correspond à la plage d'angle de 0 degrés à 180 degrés. Lorsque vous utilisez des bibliothèques Raspberry Pi, telles que RPi.GPIO ou des bibliothèques plus avancées, vous devez convertir ces temps en valeurs de rapport cyclique. Bien que l'ensemble du processus semble un peu compliqué, heureusement, les fonctions de la bibliothèque ont généralement été encapsulées pour vous, et il vous suffit de fournir directement l'angle souhaité.
Cependant, même si les fonctions de la bibliothèque ont été encapsulées, certains détails méritent d'être notés lors du fonctionnement réel. Par exemple, différents modèles de servos peuvent présenter de légères différences dans les paramètres, ce qui vous oblige à vérifier soigneusement la documentation pertinente avant utilisation pour vous assurer que les paramètres définis correspondent aux servos réels. De plus, lors de l’écriture du code, faites attention à la structure logique claire du code et chaque étape doit être rigoureuse et précise. Bien que les fonctions de la bibliothèque simplifient de nombreuses opérations, si la logique du code prête à confusion, le servo peut toujours ne pas tourner comme prévu. Dans le même temps, pendant le processus de débogage, nous devons savoir utiliser divers outils de débogage pour découvrir et résoudre rapidement les problèmes possibles, tels que les erreurs de réglage du temps de haut niveau, les erreurs de calcul du rapport cyclique, etc. Ce n'est qu'en considérant chaque aspect de manière complète et méticuleuse que nous pouvons garantir que le servo peut tourner avec précision selon vos instructions et réaliser avec succès les fonctions que vous attendez.
Si vous laissez directement le servo sauter de 0 degrés à 180 degrés, il rebondira soudainement comme s'il avait peur. Cela rendra non seulement le mouvement rigide, mais endommagera également facilement le servomoteur. Si vous voulez que les mouvements soient beaux, vous devez utiliser l'idée de "dégradé". ️ 1. Définissez d’abord un angle de départ et un angle cible. ️ 2. Calculez combien d'étapes sont nécessaires au milieu. ️ 3. Ne faites pivoter qu'une petite quantité à chaque étape et ajoutez un peu de retard au milieu. Par exemple, si vous écrivez une boucle qui augmente de 1 degré à chaque fois et retarde de 20 millisecondes, le servo se déplacera en douceur comme un vrai bras. Cette méthode est particulièrement pratique pour faire marcher des robots ou saisir des bras de robots, et l'effet visuel est instantanément amélioré de plusieurs niveaux.
Après avoir travaillé si dur pour écrire le programme, le servo tremble comme de la balle. Cette situation est probablement due à un problème d'alimentation électrique. Tout d’abord, vérifiez si l’alimentation est stable. Utilisez un multimètre pour mesurer la tension. Si la fluctuation est importante, ajoutez un condensateur pour la filtrer. Deuxièmement, il se peut que le signal PWM lui-même soit instable et que le PWM simulé par le logiciel soit facilement perturbé lorsque le Raspberry Pi exécute plusieurs tâches. La solution consiste à utiliser des broches matérielles PWM ou à mettre à niveau la bibliothèque. Cette bibliothèque utilise la technologie DMA (accès direct à la mémoire) et la précision du signal sera bien supérieure. Il est également possible que la ligne de signal soit trop longue et sujette à des interférences. Essayez d'utiliser une ligne DuPont plus courte ou enfilez une petite résistance sur la ligne de signal.
En voyant cela, vous devriez être sûr de pouvoir contrôler le servo avec Raspberry Pi. Je suis assez curieux, pour quels projets intéressants comptez-vous utiliser cette compétence ? Est-ce un bras robotique pour saisir des objets, ou est-ce un petit robot qui secoue la tête ? Venez dans la zone de commentaires pour discuter de vos réflexions. Si vous trouvez cet article utile, n'oubliez pas de l'aimer et de le partager avec plus d'amis, afin que davantage de personnes puissent rejoindre la famille des créateurs.
Heure de mise à jour:2026-03-08
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.






















