


























TECHNISCHE UNTERSTÜTZUNG


Veröffentlicht 2026-02-25
Beim Spielen mit demServo, sind Sie jemals auf diese Peinlichkeit gestoßen: Obwohl das Programm geschrieben ist, ist dasServoZittert ständig oder bleibt das Uhrwerk hängen wie bei einem PPT? Tatsächlich liegt das wahrscheinlich daran, dass das Timing nicht stimmt. Vor allem bei Verwendung eines 6-Kanal-USBServoBei einem Controller wie Micro ist es wichtiger, seinen „Puls“-Rhythmus zu verstehen, als welches Servo Sie wählen. Heute werden wir darüber sprechen, wie Sie die Sache reibungslos gestalten und Ihr Projekt reibungslos vorantreiben können.
Die Drehzahl des Lenkgetriebes ist, vereinfacht ausgedrückt, die Änderungsrate der Impulsbreite des Steuersignals. Mit Micro können wir die Zeit, die jeder Kanal benötigt, um vom aktuellen Winkel zum Zielwinkel zu gelangen, mithilfe von Skripten oder Anweisungen genau einstellen. Wenn Sie beispielsweise möchten, dass sich der Roboterarm innerhalb von 2 Sekunden sanft anhebt, anstatt innerhalb von 0,1 Sekunden auszustoßen, müssen Sie im Befehl den Parameter „Geschwindigkeit“ oder „Zeit“ festlegen. Mithilfe seines Inneren können Sie berechnen, wie viele Übergangsimpulse in der Mitte gesendet werden müssen, um eine reibungslose Bewegung zu erzielen. Im tatsächlichen Einsatz können Sie es zunächst manuell testen, um die geeignete Übungsdauer zu ermitteln, und diese dann in den Code schreiben.
Wenn das Servo wackelt, ist das nicht die Schuld an der Qualität des Servos. Jitter tritt häufig auf, weil die Aktualisierungsfrequenz des Steuersignals nicht mit der internen Schaltung des Servos übereinstimmt oder die Stromversorgung unzureichend ist. Obwohl Micro über leistungsstarke Spannungsstabilisierungs- und Signalverarbeitungsfunktionen verfügt, zieht der Steuerchip in den Servos „Wind an“, wenn die Welligkeit Ihrer Stromversorgung zu groß ist oder wenn Sie mehrere Servos mit hohem Drehmoment gleichzeitig antreiben und die Spannung sinkt, was als Hin- und Herzittern erscheint. Wenn sich der Signalleitung außerdem starke Störquellen wie Motoren nähern, kann es leicht zu Störungen kommen. Überprüfen Sie zunächst die Stromversorgung und messen Sie die dynamische Spannung mit einem Multimeter. Oft ist das Problem gelöst.
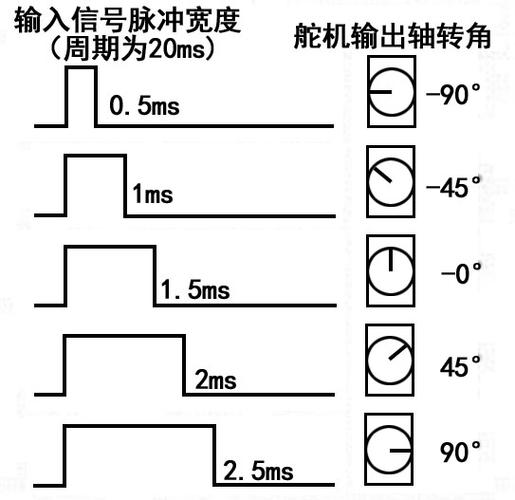
Standardmäßig ist der Servoimpulsbereich von Micro normalerweise auf 1000 µs bis 2000 µs eingestellt, was 0 bis 180 Grad entspricht. Im tatsächlichen Betrieb verfügen viele heimische Servos jedoch möglicherweise über einen größeren Hubbereich, beispielsweise 500 µs bis 2500 µs, und können sich sogar um mehr als 200 Grad drehen.
Wenn Sie feststellen, dass sich das Servo nicht in den angegebenen Winkel drehen kann oder auf halbem Weg der Drehung stecken bleibt, müssen Sie die minimale und maximale Impulsbreite jedes Kanals in der Software kalibrieren. Dieser Vorgang ist nicht kompliziert. Sie müssen nur den Kanal auswählen, den Schieberegler manuell verschieben, die tatsächliche Drehgrenze des Servos sorgfältig beobachten und dann den entsprechenden Wert eingeben. Auf diese Weise kann das Lenkgetriebe effektiv vor Beschädigungen geschützt und sein volles Potenzial ausgenutzt werden.
Bei Verwendung der USB-zu-Seriell-Schnittstelle zur Steuerung ist der häufigste Fehler eine nicht übereinstimmende Baudrate. In der Software ist die Baudrate standardmäßig auf 9600 eingestellt. Wenn Sie diese jedoch in den Code schreiben, ist eine Kommunikation definitiv nicht möglich. Darüber hinaus stellt sich auch die Frage des Unterrichtsformats. Das verwendete kompakte Protokoll stellt äußerst strenge Anforderungen an die Datenverifizierung. Auch wenn es sich nur um einen Byte-Übertragungsfehler handelt, wird er direkt ignoriert. Es wird empfohlen, zum Senden einfacher Befehle zunächst die offizielle Testsoftware zu verwenden. Wenn das Gerät normal laufen kann, überprüfen Sie sorgfältig den von Ihnen selbst geschriebenen Code. Vergessen Sie außerdem nicht die Verzögerung, die beim Umschalten zwischen Transceivern und Transceivern während der Halbduplex-Kommunikation auftritt. Obwohl diese Situation sehr schnell bewältigt wird, wird die Kommunikation durch das Hinzufügen einiger Millisekunden Verzögerung stabiler, wenn Anweisungen kontinuierlich mit hoher Frequenz gesendet werden.
Gleichzeitig gibt es noch einige andere Aspekte, auf die geachtet werden muss. Stellen Sie beim Anschluss eines USB-zu-Seriell-Geräts sicher, dass die Schnittstelle stabil und nicht locker ist, da sonst die Stabilität der Datenübertragung beeinträchtigt werden kann. Darüber hinaus können unterschiedliche Betriebssysteme unterschiedliche Kompatibilität aufweisen, sodass beim Debugging-Prozess die Betriebssystemversion vollständig berücksichtigt werden muss. Wenn Sie auf eine instabile Kommunikation stoßen, können Sie neben der Überprüfung der Baudrate, des Befehlsformats, der Verzögerung und anderer häufiger Probleme auch versuchen, die USB-Schnittstelle zu ändern oder den Computer neu zu starten, um einige potenzielle Störfaktoren zu beseitigen und eine stabile und genaue Steuerung in verschiedenen Umgebungen sicherzustellen.
Wenn Sie koordinierte Aktionen von 6 Servos gleichzeitig erreichen möchten, anstatt einzeln zu agieren, ist die Verwendung der „Skript“-Funktion der Schlüssel. Sie können hier sorgfältig ein Skript schreiben, die Zielposition und Bewegungszeit jedes Kanals sorgfältig festlegen und dann den Controller das Skript unabhängig ausführen lassen, ohne sich mehr darauf zu verlassen, dass der Computer Befehle in Echtzeit sendet. Selbst wenn der Computer einfriert, kann der Roboterarm auf diese Weise eine Reihe kombinierter Aktionen reibungslos ausführen.
Wenn die Echtzeitsteuerung über den Host-Computer erfolgt, muss der „Mehrkanal-Simultanbefehl“ aktiviert werden, um die Zielwinkel aller Kanäle gleichzeitig zu bündeln und zu senden, um eine durch Netzwerkverzögerungen verursachte Desynchronisation zu vermeiden.
Wenn das Servo klemmt, sind Sie wahrscheinlich hungrig. Jedes Servo kann im gesperrten Zustand mehrere Ampere Strom verbrauchen. Wenn 6 davon zusammenarbeiten, kann der Momentanstrom leicht 20 A überschreiten. Wenn Sie nur ein USB-Netzteil verwenden, ist es nicht nur nicht in der Lage, es zu transportieren, sondern es kann auch dazu kommen, dass die Hauptplatine des Computers durchbrennt. Der richtige Ansatz besteht darin, eine separate Stromversorgung bereitzustellen, das Servostromkabel direkt an eine Batterie oder ein Schaltnetzteil mit ausreichender Leistung anzuschließen und den Signalempfang nur über USB zuzulassen. Beachten Sie, dass das Erdungskabel des Netzteils und das Erdungskabel des Computers mit derselben Erdung verbunden sein müssen, da sonst das Signal zufällig schwebt. Wenn das Netzteil vorhanden ist, können die meisten Ruckler und Jitter behoben werden.
Ist Ihnen angesichts dessen klar, dass die Steuerung des Lenkgetriebes nicht so mysteriös ist? Tatsächlich liegen viele Probleme im Detail. Was war das schwierigste Lenkgetriebeproblem, mit dem Sie jemals bei der Arbeit an einem Projekt konfrontiert waren? Teilen Sie gerne Ihre „Geschichte von Blut und Tränen“ im Kommentarbereich mit und vermeiden Sie gemeinsam Fallstricke. Wenn Sie diesen Artikel nützlich finden, vergessen Sie nicht, ihn zu liken und weiterzuleiten, damit mehr Freunde, die Servos spielen, ihn sehen können!
Aktualisierungszeit: 25.02.2026
Wenden Sie sich an den Produktspezialisten von Kpower, um einen geeigneten Motor oder ein geeignetes Getriebe für Ihr Produkt zu empfehlen.






















