


























TECHNISCHE UNTERSTÜTZUNG


Veröffentlicht 2026-03-23
Kennen Sie schon einmal diese Situation: Sie haben ein Mikro gekauftServo Servound wollte ein Programm schreiben, um es zu steuern. Nach längerer Online-Suche funktionierte jedoch entweder der Code nicht oder die Bibliothek konnte nicht installiert werden? Keine Sorge, heute werden wir darüber sprechen, wie Sie mit 3 dieses kleine Kerlchen in Ihre kreativen Projekte integrieren und gehorsam machen können.
Seine prägnante Syntax und sein reichhaltiges Bibliotheks-Ökosystem machen es zu einer ausgezeichneten Wahl für die schnelle Prototyping-Entwicklung. Durch die Steuerung von Mikroservos müssen Sie sich nicht um die Details der zugrunde liegenden Register wie in der C-Sprache kümmern. Sie können das Servo mit nur wenigen Codezeilen zum Drehen bringen. Dies ist einfach ein lebensrettender Strohhalm zur schnellen Überprüfung in der Produktinnovationsphase. Darüber hinaus lässt es sich problemlos mit erweiterten Funktionen wie visueller Erkennung und Datenanalyse kombinieren, sodass das Lenkgetriebe nicht mehr nur ein einfacher Aktuator, sondern Teil des intelligenten Systems ist.
Die gängigsten Lösungen auf dem Markt sind RPi.GPIO und .
Wenn Sie einen Raspberry Pi verwenden, ist RPi.GPIO die einfachste Wahl. Es kann GPIO-Pins direkt betreiben, um PWM-Signale zu erzeugen. Es ist jedoch zu beachten, dass dieses Paket gewisse Einschränkungen bei der Unterstützung der PWM-Genauigkeit aufweist, was leicht zu Vibrationen des Servos führen kann.
Im Vergleich wirkt das Servo-Paket professioneller. Es verwendet Hardware-PWM oder Software-PWM, um die Impulsbreite präzise zu steuern, sodass sich das Servo gleichmäßig und gleichmäßig dreht. Es wird empfohlen, dieses Paket zu verwenden, da es vollständiger gekapselt ist, die gleichzeitige Steuerung mehrerer Servos unterstützt und der Code eleganter zu schreiben ist.
Der erste Schritt besteht darin, sicherzustellen, dass Ihr 3 erfolgreich installiert wurde. Geben Sie dann genau Folgendes ein:pip3 --servoim Terminal. Durch die Ausführung dieses Befehls werden alle erforderlichen Bibliotheken und Abhängigkeiten vollständig installiert.
1. Wenn Sie einen Raspberry Pi verwenden, müssen Sie auch die I2C- oder Hardware-PWM-Funktion aktivieren. Sie können die entsprechende Schnittstelle in raspi- öffnen. 2. Achten Sie beim Herstellen von Hardwareverbindungen besonders auf die drei Drähte des Servos: Der braune Draht muss mit GND verbunden werden, der rote Draht muss mit der 5-V-Stromversorgung verbunden werden und der orangefarbene Draht muss mit dem GPIO-Steuerpin verbunden werden. Achten Sie darauf, es nicht verkehrt herum anzuschließen, da sonst das Servo durchbrennen kann. Es wird empfohlen, als Stromversorgung ein externes 5V-Netzteil zu verwenden. Beziehen Sie den Strom nicht direkt über die Pins des Raspberry Pi, da der Strom sonst nicht ausreicht.
Der folgende Code hat die Funktion, das Servo im Bereich von 0 Grad bis 180 Grad hin und her schwingen zu lassen. Zuerst verwendenPlankeUndpwmioum den PWM-Kanal zu initialisieren, um eine grundlegende Umgebung für den Betrieb des Servos aufzubauen. Als nächstes erstellen Sie eineServoObjekt, um eine präzise Steuerung des Servos zu ermöglichen. Unter ihnen ist der Schlüsselpunkt die Zuweisungserklärung, zservo.angle = 0Durch diese Anweisung kann der Winkel, um den sich das Servo drehen möchte, flexibel eingestellt werden. Das heißt, um wie viel Grad sich das Servo drehen soll, können Sie ihm den entsprechenden Grad zuweisen. Wenn Sie möchten, dass sich das Servo langsamer bewegt, damit Sie seine Drehung besser beobachten können, können Sie ein hinzufügenZeit.SchlafErklärung, um dieses Ziel zu erreichen.
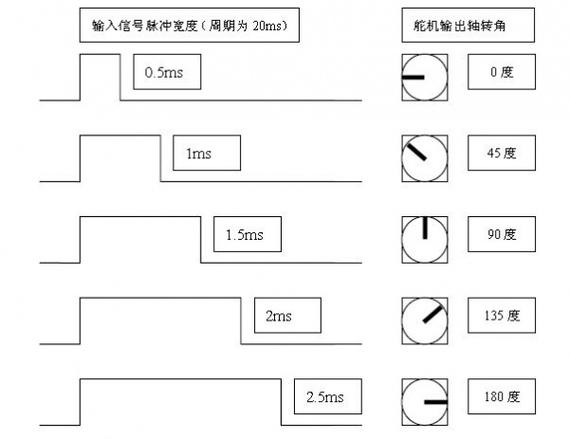
Wenn das Servo ungewöhnliche Geräusche macht, liegt meist ein Problem mit der Impulsfrequenz vor. Die Standard-PWM-Periode des Mikroservos beträgt 20 ms. Wenn die High-Level-Zeit im Bereich von 0,5 ms bis 2,5 ms liegt, beträgt der entsprechende Winkel 0 bis 180 Grad. Die Bibliothek verwendet standardmäßig diese Parametereinstellung, sodass der Benutzer die relevanten Werte nicht selbst berechnen muss.
Wenn das Projekt die Zusammenarbeit mehrerer Servos erfordert, beispielsweise bei der Herstellung eines Roboterarms oder eines Roboters mit mehreren Gelenken, ist die Verwendung der Bibliothek besonders praktisch. Sie müssen nur mehrere erstellenServoObjekte, die jeweils an einen anderen GPIO-Pin gebunden sind, und legen dann ihre Winkel individuell fest. Es gibt einen kleinen Trick: bei der Verwendungpwmio., setzenStellen Sie den Wert auf 50 ein, was der Standardfrequenz des Servos entspricht. Wenn es sich um eine solche PWM-Erweiterungskarte handelt, ist der Code fast derselbe. Sie müssen nur die I2C-Adresse ändern, um 16 Servos gleichzeitig zu steuern, was für komplexe Projekte sehr gut geeignet ist.
Viele Freunde berichteten, dass sich das Servo plötzlich nicht mehr bewegte oder der Winkel nicht stimmte. Der häufigste Grund ist ein Problem mit der Stromversorgung. Der Momentanstrom eines Mikroservos kann mehr als 1A erreichen. Werden mehrere Servos gleichzeitig aktiviert, führt ein plötzlicher Spannungsabfall zum Neustart des Raspberry Pi. Die Lösung besteht darin, ein separates geregeltes Netzteil zur Stromversorgung des Servos zu verwenden und das Erdungskabel mit der Masse des Raspberry Pi zu verbinden. Eine weitere Gefahr ist der Winkelbereich. Die mechanische Grenze einiger Modelle liegt nur bei 0-120 Grad. Wenn Sie es zu einem 180-Grad-Befehl zwingen, bleibt das Getriebe stecken und macht ein „Klick“-Geräusch. Schalten Sie zu diesem Zeitpunkt sofort das Gerät aus und überprüfen Sie die spezifischen Parameter des Servomodells.
Durch die Steuerung des Micro-Servo-Servos verwandeln Sie Ihre Kreativität tatsächlich schnell in ein bewegliches Werk. Vom Debuggen einzelner Servos bis hin zur Mehrkanalverknüpfung können Sie damit viel Zeit beim Debuggen sparen. Nachdem Sie dies nun gelesen haben, könnten Sie sich genauso gut fragen: Welche Art von Aktionseffekten können diese kleinen Servos bei Ihrem nächsten innovativen Produkt Ihrem Design verhelfen, das zu erreichen, woran Sie vorher nie zu denken gewagt hätten?
Aktualisierungszeit: 23.03.2026
Wenden Sie sich an den Produktspezialisten von Kpower, um einen geeigneten Motor oder ein geeignetes Getriebe für Ihr Produkt zu empfehlen.






















