


























ASSISTANCE TECHNIQUE


Publié 2026-02-16
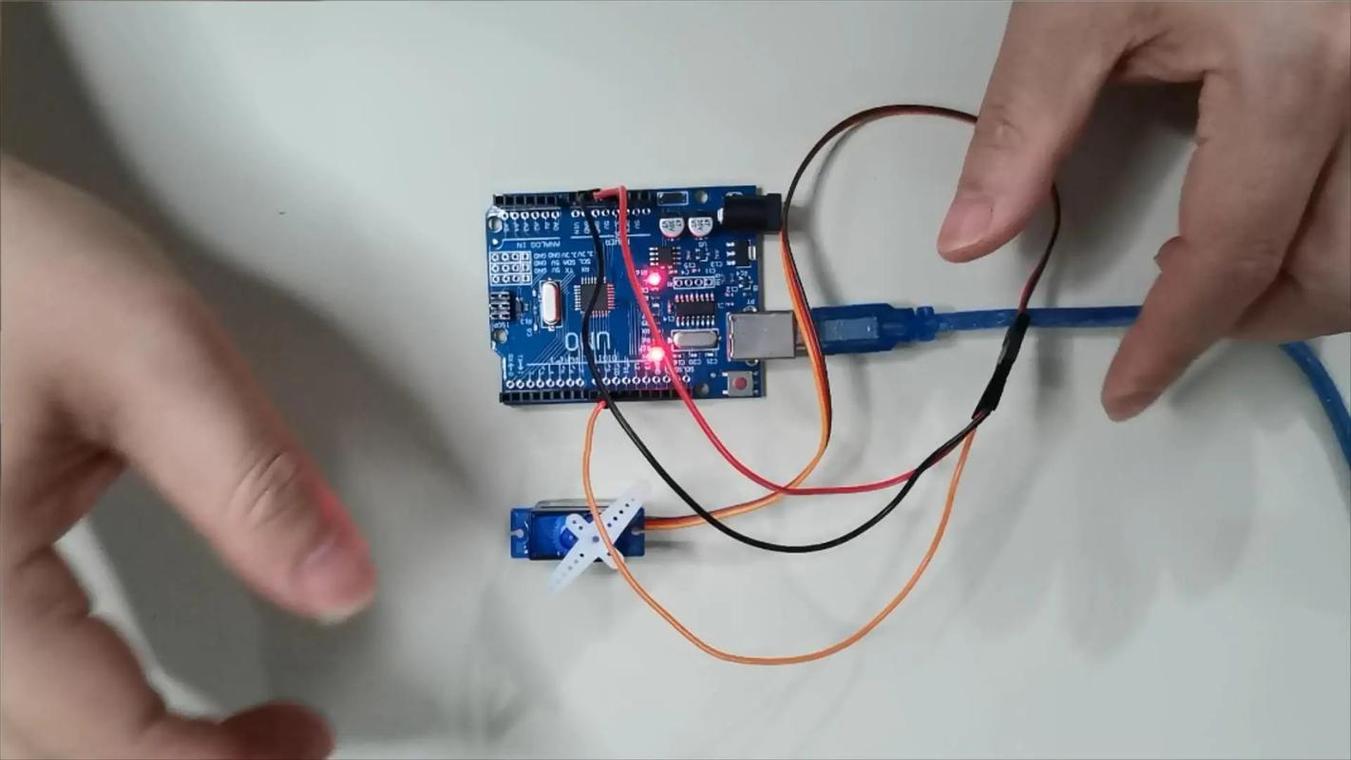
je viens de recevoir leservomoteuret je voulais le connecter au microcontrôleur, mais j'étais confus en regardant les trois fils ? Ne vous inquiétez pas, c'est un problème que presque tous les débutants qui jouentservomoteurs rencontreront. En fait, le câblage est plus simple que vous ne le pensez. Tant que vous comprenez à quoi servent les trois fils et suivez les étapes étape par étape, vous pouvez être sûr d'obtenir leservomoteurdéménagement dans une demi-heure.
Les trois fils sortant du servo sont généralement le fil d'alimentation, le fil de terre et le fil de signal. Le fil d'alimentation est généralement rouge et est connecté à la broche 5 V du microcontrôleur pour alimenter le servo. Le fil de terre est marron ou noir et est connecté à la broche GND du microcontrôleur pour permettre au circuit de former une boucle. La ligne de signal est généralement orange ou jaune, connectée à la broche de sortie PWM du microcontrôleur et utilisée pour contrôler l'angle de rotation du servo. Comprendre les fonctions correspondant aux couleurs est une première étape solide.
Si vous avez connecté en fonction de la couleur, mais que le servo ne bouge pas, la raison la plus courante est une alimentation électrique insuffisante. Le courant de la broche 5 V du microcontrôleur lui-même est limité et il ne peut pas piloter le gros mangeur du servo. Dans ce cas, le servo peut vibrer légèrement mais ne pas tourner, voire ne pas répondre du tout. Essayez de connecter une alimentation externe séparée au servo, telle qu'une batterie ou un module de stabilisation de tension, et connectez le fil de terre de l'alimentation au fil de terre du microcontrôleur. La ligne de signal reste inchangée et le problème peut généralement être résolu.
Le choix de l'alimentation dépend du type de servo que vous utilisez. S'il s'agit d'un petit servomoteur ordinaire, le courant de fonctionnement est de plusieurs centaines de milliampères et il peut être piloté en le modifiant avec quelques piles sèches ou une banque d'alimentation pour téléphone portable. S'il s'agit d'un servo métallique à couple élevé, le courant de fonctionnement peut atteindre plusieurs ampères, vous devez donc envisager d'utiliser une batterie spéciale pour modèle d'avion ou un module de stabilisation de tension haute puissance. La clé est de regarder la tension de fonctionnement nominale et le courant de rotor bloqué du servo. Selon ce paramètre, ajoutez une marge de 20% pour le rendre pratique à utiliser.
Une fois le câblage terminé, il est temps d’écrire le code. Vous devez émettre une onde PWM sur la broche où se trouve la ligne de signal du microcontrôleur, qui est le signal de commande nécessaire pour simuler le servo. Généralement, l'appareil à gouverner nécessite une fréquence de 50 Hz, ce qui signifie un cycle de 20 millisecondes. Dans ce cycle, le temps de niveau haut est compris entre 0,5 millisecondes et 2,5 millisecondes, correspondant à 0 degré à 180 degrés du servo. Il existe des bibliothèques Servo prêtes à l'emploi dans les fonctions de bibliothèque de nombreux microcontrôleurs. Vous pouvez appeler directement l'angle d'écriture sans avoir à calculer vous-même ces temps compliqués.
Si vous voulez que le robot bouge, un seul servo ne suffit certainement pas. Lors du câblage de plusieurs servos, l’alimentation électrique devient un gros problème. Pour le moment, ne pensez pas à utiliser l’alimentation du microcontrôleur. Vous devez utiliser une alimentation externe et l'alimentation doit être suffisamment grande. Connectez les fils rouges de tous les servos ensemble au pôle positif de l'alimentation, et les fils noirs ensemble pour connecter le pôle négatif de l'alimentation et la masse commune du microcontrôleur. Les lignes de signal sont respectivement connectées à différentes broches PWM du microcontrôleur. De cette façon, chaque servo peut être contrôlé indépendamment dans le programme et les laisser travailler ensemble.
Parfois l'angle est écrit, mais la position du servo est toujours déviée. Cela peut être dû à des interférences dans la ligne de signal, notamment lorsque le câblage est relativement long. Essayez de tordre le fil de signal et le fil de terre ensemble, ce qui peut jouer un certain effet anti-interférence. De plus, le potentiomètre à l'intérieur du servo présente également des erreurs physiques. Vous pouvez légèrement ajuster la plage de largeur d'impulsion dans le code et l'affiner pour rendre l'angle plus précis. S'il n'est pas précis après une utilisation à long terme, il se peut que le servo lui-même soit usé et doive être remplacé.
Brûler quelque chose est généralement causé par une trop grande quantité de courant ou un mauvais câblage. Assurez-vous de revérifier la tension d’alimentation avant le câblage. Ne connectez jamais l’alimentation haute tension directement au servo. Le pôle négatif de l'alimentation externe qui alimente le servo doit être connecté au GND du microcontrôleur, afin qu'un niveau de référence unifié puisse être formé. Lors du débogage du programme, vous pouvez d'abord placer le servo à un angle moyen avant la mise sous tension pour éviter que le servo ne tourne soudainement vers le bas et ne provoque un courant excessif au moment de la mise sous tension. Si vous sentez que le servo est chaud ou fait des bruits anormaux, coupez immédiatement l'alimentation et vérifiez.
J'espère que ce contenu pourra vous aider à faire avec succès le premier pas dans le contrôle du servo de direction. Pensez-y, quel est le problème spécifique qui vous dérange le plus lorsque vous effectuez du câblage ou de la programmation ? Bienvenue pour discuter de votre expérience dans la zone de commentaires. Si vous le trouvez utile, n’oubliez pas de l’aimer et de le partager avec d’autres amis qui en ont besoin.
Heure de mise à jour:2026-02-16
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.






















