


























ASSISTANCE TECHNIQUE


Publié 2026-04-21
Si vous vous demandez si unservomoteurLe moteur nécessite une carte pilote séparée, la réponse directe est :pas toujours, mais dans de nombreuses situations pratiques, oui.Un passe-temps standardservomoteurcontient un circuit de commande intégré et un petit moteur à courant continu, ce qui lui permet d'être piloté directement par la broche PWM (modulation de largeur d'impulsion) d'un microcontrôleur. Cependant, lorsque vous devez contrôler plusieursservomoteurs, alimenter un servo de grande taille ou obtenir un mouvement fluide et sans gigue, une carte pilote dédiée devient essentielle. Cet article explique exactement pourquoi les servos peuvent fonctionner sans pilote supplémentaire, quand vous devez en ajouter un et comment prendre une décision en fonction de votre projet réel.
À l’intérieur de chaque servo de position standard (du type utilisé dans les bras robotiques, les voitures RC et les animatroniques), il y a trois composants principaux :
Un moteur à courant continu
Un ensemble de réducteurs
Un petit tableau de contrôleavec un potentiomètre pour le retour de position
Cette carte de contrôle interne reçoit un signal PWM (généralement 50 Hz, avec des largeurs d'impulsion comprises entre 1 ms et 2 ms) et entraîne directement le moteur à courant continu pour faire tourner l'arbre de sortie à l'angle commandé. Parce que l'électronique de commande est déjà à l'intérieur du servo,aucune carte de pilote externe n'est requise pour le fonctionnement de base– vous pouvez connecter le fil de signal du servo directement à une broche du microcontrôleur et ses fils d'alimentation à une alimentation externe appropriée (généralement 4,8 V-6,0 V).
Exemple concret :Un débutant qui construit une simple griffe de robot connecte souvent un petit servo directement à une carte microcontrôleur. Le microcontrôleur génère le signal PWM et le servo se déplace correctement sans aucun pilote supplémentaire. Cela fonctionne parfaitement pour un ou deux petits servos.
Même si un seul servo peut être contrôlé directement, de nombreux projets échouent ou fonctionnent mal sans carte pilote. Voici les trois cas les plus fréquents où une carte driver est nécessaire.
Les microcontrôleurs ont un nombre limité de broches PWM (par exemple, une carte typique à faible coût ne peut avoir que 6 sorties matérielles PWM). Plus important encore, la génération de signaux PWM précis pour plusieurs servos à l'aide du bit‑banging logiciel consomme énormément de temps CPU, provoquant une gigue, des impulsions manquées et des mouvements irréguliers.
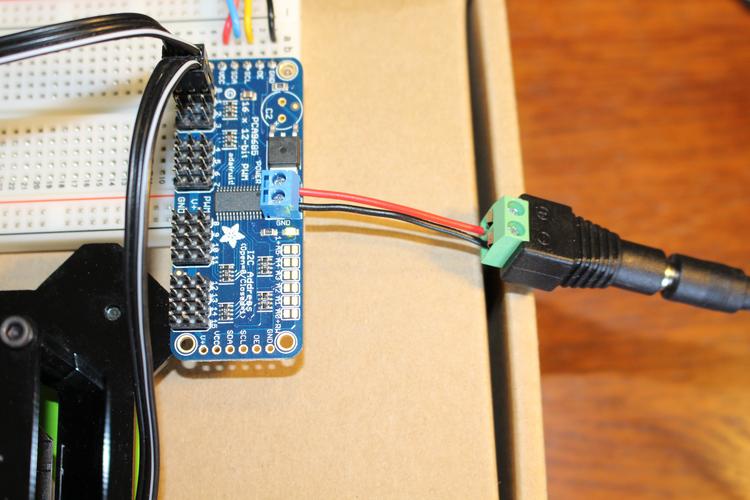
Une carte de servomoteur (telle qu'un pilote PWM à 16 canaux) décharge la génération PWM du microcontrôleur. Il utilise une interface I²C (seulement deux broches sur le microcontrôleur) pour contrôler jusqu'à 16 servos simultanément, avec une synchronisation stable et sans gigue.
Exemple concret :Un passionné qui construisait un robot marcheur à six pattes (12 servos) a essayé de connecter tous les servos directement au microcontrôleur. Les jambes se sont contractées de manière aléatoire et le microcontrôleur a surchauffé. Après l'ajout d'une carte de servomoteur à 16 canaux, chaque jambe s'est déplacée en douceur et le microcontrôleur n'a eu qu'à envoyer de simples commandes de position via I²C.
Un seul petit servo peut consommer 200 à 500 mA en mouvement et jusqu'à 1 A en cas de blocage. La plupart des cartes de microcontrôleur ne peuvent pas fournir plus de 500 mA au total à partir de leur broche 5 V. Lorsque vous connectez ne serait-ce que deux servos directement à la sortie 5 V de la carte, la tension chute, le microcontrôleur se réinitialise ou les servos se comportent de manière imprévisible.
Une carte pilote résout ce problème en :
Tirer de l'énergie directement d'unalimentation séparée en courant élevé(par exemple, 5 V/5 A)
Fournir des traces de puissance et des condensateurs dédiés pour chaque canal d'asservissement
Isoler la puissance du servo de la logique délicate du microcontrôleur
Exemple concret :Un fabricant a construit un support de caméra panoramique avec deux servos de taille moyenne. Lorsque les deux servos bougeaient en même temps, le microcontrôleur redémarrait de manière aléatoire. Le problème a disparu instantanément après l'utilisation d'une carte de commande alimentée par un adaptateur mural 5 V/3 A : le microcontrôleur ne fournissait désormais que les signaux logiques à faible courant.
Les servos de position standard attendent un signal PWM de 50 Hz.Servos à rotation continue(souvent utilisés comme roues) fonctionnent également avec PWM, mais ils nécessitent un rafraîchissement constant du signal même en position neutre. Sans pilote dédié, les erreurs de synchronisation du logiciel provoquent des dérives indésirables.
Les servos à grande échelle (par exemple, pour les robots industriels ou les modèles RC lourds) fonctionnent souvent à 7,4 V ou 12 V. Le niveau logique 5 V d’un microcontrôleur ne peut pas piloter directement son entrée de commande de manière fiable, et les broches d’alimentation du microcontrôleur ne peuvent pas gérer le courant. Une carte pilote avec changement de niveau et régulation de puissance externe devient obligatoire.
Vous pouvez ignorer le tableau de bord en toute sécurité sitousde ces conditions sont vraies :
Vous contrôlezseulement un ou deux petits servos standards(par exemple, taille 9 g à 20 g)
La broche 5 V de votre microcontrôleur peut fournir au moins 1 A (vérifiez les spécifications de votre carte)
Les servos bougent rarement et jamais sous une charge mécanique élevée
Vous pouvez utiliser le PWM logiciel sur des broches non dédiées (même si le timing peut être moins précis)
Exemple concret :Un simple tracker solaire qui déplace un petit servo toutes les 10 minutes fonctionne parfaitement sans carte pilote. Le microcontrôleur dort la plupart du temps et le servo consomme le courant de pointe pendant seulement 0,5 seconde.
De nombreux débutants confondent les servomoteurs avec les moteurs pas à pas ou les moteurs à courant continu ordinaires. UNmoteur à courant continu nuou unmoteur pas à pasnécessitent absolument un pilote externe (pont en H ou pilote pas à pas) car ils n'ont pas d'électronique de contrôle intégrée. Les servomoteurs sont uniques : ils intègrent le pilote à l’intérieur du boîtier. C’est pourquoi vous pouvez connecter un servo « directement » alors que vous ne pouvez pas faire de même pour un stepper.
Pour obtenir les meilleures performances sans gaspiller d’argent en matériel inutile, utilisez ce processus de décision simple :
1. Comptez vos servos– Si ≥3 servos → achetez une carte pilote (par exemple, pilote PWM 16 canaux).
2. Vérifiez votre alimentation– Si le courant de décrochage total de tous les servos dépasse la valeur nominale des broches de 5 V de votre microcontrôleur → utilisez une carte pilote avec alimentation externe.
3. Test de gigue– Écrivez un programme de balayage simple. Si un servo tremble ou vibre au repos → ajoutez une carte pilote.
4. Pour tous les autres cas– Commencez sans carte de pilote, mais conservez une carte de pilote comme sauvegarde à faible coût (5 $ à 10 $).
Conclusion fondamentale finale répétée :Un servomoteur netoujoursbesoin d'une carte pilote car elle dispose d'un circuit de contrôle interne. Cependant, pour des projets multiservos fiables, des applications à courant élevé ou des performances sans gigue, une carte pilote dédiée n'est pas seulement utile : elle est essentielle.
Étape d'action :Avant d'acheter des pièces, calculez le courant de décrochage total de vos servos (trouvez la valeur dans la fiche technique) et comparez-le au courant de sortie maximum de votre microcontrôleur. Si le nombre est plus élevé ou si vous prévoyez d'utiliser plus de deux servos, commandez une carte pilote avec vos servos – cela vous évitera des heures de débogage et évitera d'endommager les composants.
Heure de mise à jour:2026-04-21
Contactez le spécialiste des produits Kpower pour recommander un moteur ou une boîte de vitesses adapté à votre produit.






















